
Mô tả tối thiểu của hướng

1. Góc Euler:
- Góc ơle hình thành mô tả hướng tối thiểu bằng cách tổ hợp các thành phần độc lập tuyến tính của ma trận quay trong hệ tọa độ hiện thời (ba lần quay quanh ba trục của ba hệ quy chiếu khác nhau). Tùy theo cách tổ hợp cụ thể 3 thành phần độc lập từ 9 thành phần ban đầu có thể đạt được 12 bộ góc ơle khác nhau.
(Ví dụ một bộ góc ơle là zyz, nghĩa là quay quanh trục z, quay quanh trục y, rồi lại quay quanh trục z, tức là trong một bộ góc ơle có thể quay quanh một trục tối đa 2 lần, song phải là 2 lần không liên tiếp. Vậy khởi xuất nếu một trục quay có thể có mặt hai lần thì ban đầu sẽ có bộ 6 lần quay, quanh 6 trục x, y, z, x, y, z.
Có ba khả năng chọn trục quay đầu tiên hoặc x, hoặc y, hoặc z.
Có hai khả năng chọn trục quay thứ hai, chọn 2 trong 3 trục trên trừ trục đã chọn ở bước trước, vì hai trục quay giống nhau không được thực hiện liên tục.
Có hai khả năng chọn trục quay lần ba vì có thể chọn lặp lại trục đầu tiên và còn một trục chưa dùng lần nào.
Vậy số khả năng của phép quay ơle là k = 3.2.2 = 12)
Ví dụ: Phép quay ơle ZYZ = φ δψ
- Quay một góc quanh trục Oz đầu tiên để được hệ O’.
- Quay một góc quanh trục Oy’ vừa nhận được để được hệ O”.
- Quay một góc quanh trục Oz” vừa nhận được để được hệ O”’.
Phương trình mô tả biến đổi hỗn hợp này là tích của ba ma trận quay liên tiếp nói trên, matlab sẽ cho ra kết quả chính xác vì vậy không trình bày ở đây.
REUL = Rot(z, φ ).Rot(y’, δ ).Rot(z”,ψ )
Nếu cho trước ma trận kết quả của phép biến đổi ơle với trình tự các phép quay quanh các trục đã cho trước, yêu cầu tìm giá trị góc quay đây là bài tóan ngược. Bài toán này có thể giải dễ dàng bằng cách đồng nhất các thành phần tương ứng của ma trận thuận đã biết dạng tổng quát (ma trận chứa các biến góc) và ma trận ngược cho trước (chứa các hằng số). Khéo léo chọn các phương trình sao cho việc giải là đơn giản nhất tạo đủ 3 phương trình cân bằng với ba ẩn.
Ví dụ: Kết quả phép nhân ma trận:

- Cho trước ma trận sau khi nhân bằng các góc cụ thể là:

- Nhận thấy cột cuối cùng của hai ma trận có dạng đơn giản nhất, ta có thể tạo ra hệ phương trình sau:
- Chia vế của phương trình thứ nhất cho phương trình thứ hai, tính được một ẩn.
- Thế ẩn vừa tìm được vào phương trình thứ nhất tính được một ẩn nữa.
- Sử dụng tiếp một biểu thức khác có chứa ta tính nốt được biến này.
2. Góc Roll – pitch – Yaw:
- Người ta thường ví đây là dao động của một con tàu.
- Trên cơ sở đã hiểu thế nào là góc Euler, chúng ta có thể hiểu ngắn gọn là RPY chẳng qua là bộ góc EULER theo trình tự (zyx) = ( song điểm khác biệt căn bản là ba lần quay đều thực hiện quanh ba trục của cùng một hệ quy chiếu ban đầu.

- Tương tự như trường hợp góc EULER, bài toán ngược được giải bằng cách so sánh ma trận kết quả nói trên với ma trận định hướng cho trước:
- Bộ thông số góc quay có thể xác định được bằng cách đồng nhất các phần tử tương ứng tạo ra một hệ ba phương trình ba ẩn.
Nhận xét: Phép quay ơle và phép quay RPY khác nhau ở chỗ:
Phép quay ơle quay ba lần quanh ba trục của ba hệ quy chiếu khác nhau, tư thế của vật cần định vị với hệ quy chiếu đã quay đi 3 lần được xác định bằng ma trận ơle. Thực chất là vật thể đạt tới định hướng của nó bằng cách quay hệ quy chiếu còn bản thân nó đứng cố định. (đối tượng quay đi trong phép quay này là hệ quy chiếu)
Phép quay RPY lại định vị vật thể bằng cách giữ hệ quy chiếu cố định trong khi xoay vật liên tiếp ba lần quanh ba trục của hệ quy chiếu ban đầu. (đối tượng quay đi trong phép quay này là vật thể)
– Phép quay hệ quy chiếu đi liên tiếp (ơle) theo các trục của hệ quy chiếu địa phương vừa sinh ra (trong điều kiện vật thể cố định) cho kết quả giống như phép quay liên tiếp vật thể (RPY) so với hệ quy chiếu cố định song theo thứ tự ngược lại.
- Chứng minh:
Gọi A là ma trận điểm biểu diễn điểm mút véc tơ cần biến hình trong cả hai hệ quy chiếu.
Phép quay vật so với hệ quy chiếu cố định liên tiếp:
![]() (1)
(1)
Hãy gọi A1 là ảnh của A qua ánh xạ đó ta có:
![]() (2)
(2)
Sau khi quay vật đi lần thứ nhất bởi phép thực hiện bình thường vì trục z lúc này là trục cơ bản. Lần quay thứ hai quanh trục y’ không có ma trận quay vì y’ lúc này là trục bất kì, ta phải làm trùng nó với một trục của hệ quy chiếu rồi sử dụng phép quay có bản quanh trục y cũ, sau đó trả kết quả lại như sau:
![]() (3)
(3)
Lúc này trục x” lại là trục bất kì, để có ma trận quay ta lại phải làm trùng trục quay trước khi quay, sau khi quay bằng ma trận quay tiêu chuẩn trả kết quả lại như sau:
![]() (4)
(4)
Vậy biểu thức đạt được cuối cùng ở đây chính là một trình tự ngược lại với (2). Biểu thức (2) biểu thi phép quay RPY còn (4) biểu thị ơle.
2.3. Phép biến đổi thuần nhất:
Trong giáo trình CAD/CAM khi học về biến đổi đồ họa đã nói rõ rằng ma trận (3.3) không phù hợp cho việc thể hiện phép biến đổi tịnh tiến, mặc dù để thể hiện phép quay ma trận quay chỉ cần có kích thước (3.3), các phép biến đổi tỉ lệ đều, không đều, quay, tịnh tiến có thể được biểu thị tổ hợp trong một ma trận duy nhất (4.4), nếu trọng số a44 = 1 không thể hiện phép tỉ lệ. Phép biến đổi nhờ ma trận thuần nhất gọi là phép chuyển đổi thuần nhất.
- Quy ước ma trận điểm viết sau ma trận biến hình có các ma trận biến hình như sau:
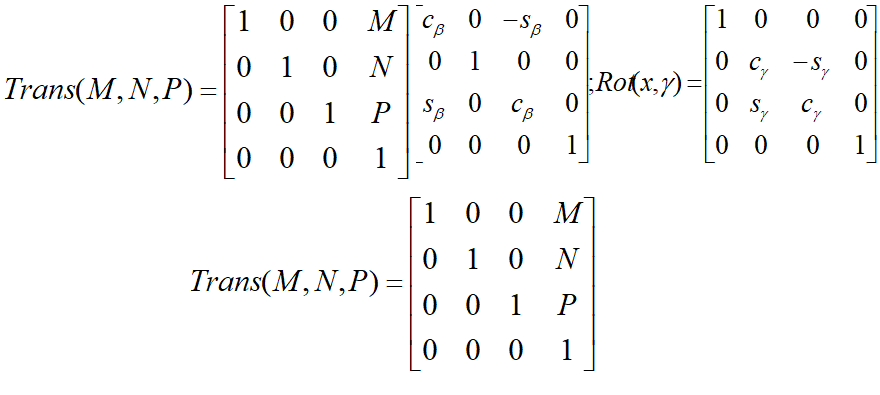
Nhờ 4 ma trận này có thể biểu thị chuyển động của một vật bất kì trong không gian, song tính trực giao của ma trận quay biểu diễn dưới dạng thuần nhất không được đảm bảo.
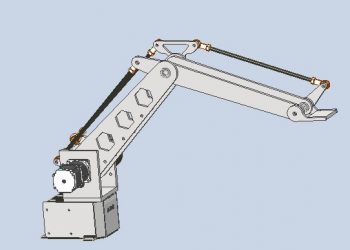
2.4. Bài toán động học thuận của tay máy:
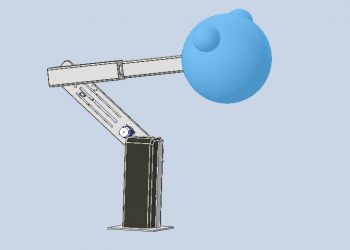
Nhiệm vụ của bài toán thuận là khi cho trước các biến khớp phải xác định vị trí và định hướng của tất cả các khâu trên cánh tay, thông thường nếu không khống chế quỹ đạo của các khâu trên cánh tay nhằm tránh va chạm với các đổi tượng khác trong vùng làm việc, người ta thường chỉ xác định vị trí và định hướng của khâu sau cùng.
Trên cánh tay có các khâu và các khớp tổ hợp với nhau mà tạo thành, cánh tay có hai hình thức cơ bản, có thể chuỗi động hình thành nên nó là kín, hoặc hở.
Các khâu và các khớp được mô tả qua các thông số được chia ra hai loại, các thông số không thay đổi (chiều dài khâu) gọi là tham số. Các thông số thay đổi (góc quay của khâu, lượng di chuyển dài của khâu tịnh tiến) gọi là biến khớp.
Trong kĩ thuật robot sử dụng phổ biến hai loại khớp thấp là quay và tịnh tiến, khớp cầu được tổ hợp từ ba khớp quay có đường trục quay giao nhau tại một điểm.
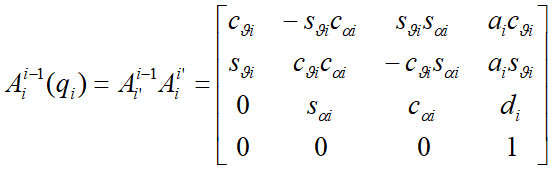
Phép chuyển đổi tọa độ được biểu diễn bằng ma trận chuyển đổi thuần nhất:
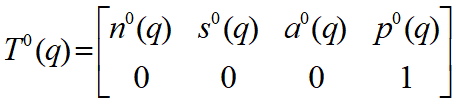
Trong đó ![]() là véc tơ định vị,
là véc tơ định vị, ![]() là các véc tơ định hướng dưới dạng cosin chỉ phương của phần làm việc. Chẳng hạn với ma trận thuần nhất có thể chọn như sau:
là các véc tơ định hướng dưới dạng cosin chỉ phương của phần làm việc. Chẳng hạn với ma trận thuần nhất có thể chọn như sau:
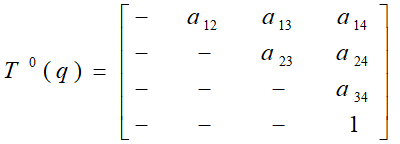
Các phần tử a12; a13; a23 là các phần tử định hướng, các phần tử a14; a24; a34 là các phần tử đinh vị. Như vậy chỉ cần 6 phần tử để mô tả định vị và định hướng.
Để định vị và định hướng từng khâu trên cánh tay cũng như khâu tác động sau cùng người ta phải gắn các hệ tọa độ suy rộng lên từng khâu, cả cơ cấu có một hệ quy chiếu chung nối với giá cố định, hệ quy chiếu này có chức năng vừa để mô tả định vị, định hướng khâu tác động sau cùng của tay máy, vừa để mô tả đối tượng tác động của tay máy mà nó cần nhận diện. Việc xây dựng các hệ quy chiếu này cần có tính thống nhất cao, đòi hỏi tính xác định duy nhất. Sau đây sẽ xem xét quy tắc DH là một quy tắc điển hình.
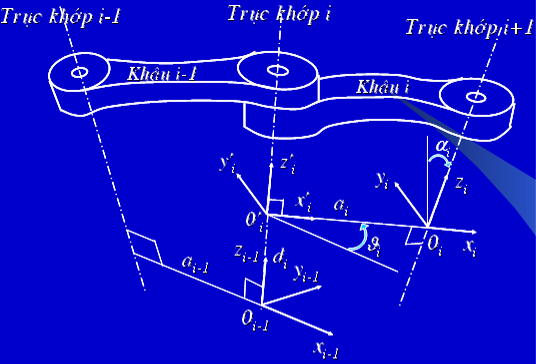
Một cách tổng quát tay máy coi là có n khâu, trong đó khâu thứ i liên kết khớp (i) với khớp (i+1) như hình vẽ. Theo quy tắc DH các hệ tọa độ được xác định theo quy ước sau:
Trục tọa độ zi trùng với trục quay của khớp (i + 1), gốc trùng với chân của đường vuông góc chung giữa trục quay khớp (i) và trục quay khớp (i+1), trục x của nó trùng với đường vuông góc chung và hướng từ trục (i-1) tới trục (i), trục y tự xác định theo quy tắc bàn tay phải.
Trục tọa độ zi-1 trùng với trục quay của khớp (i), trục x trùng phương đường vuông góc chung giữa trục (i-1) và khớp (i), chiều dương hướng từ trục (i-1) tới khớp (i). Trục y tự xác định theo quy tắc bàn tay phải.
- Quy ước các góc và khoảng cách trên lược đồ như sau:
là khoảng cách giữa hai khớp theo phương đường vuông góc chung.
di là khoảng cách giữa giao điểm của hai đường vuông góc chung với trục quay, tính theo phương của đường vuông góc chung.
-là góc quay quanh trục xi để zi-1 đến trùng với zi.
-là góc quay quanh trục zi-1 để xi-1 đến trùng với xi.
- Công việc còn lại là biến đổi sao cho hệ quy chiếu Oi-1 trùng với hệ quy chiếu Oi. Trình tự biến đổi thực hiện như sau:
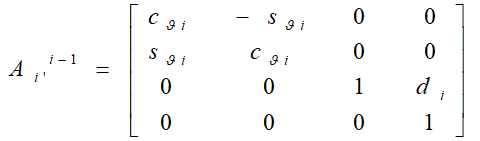
Tịnh tiến Oi-1 theo trục (Oi-1zi-1) một lượng di bằng ma trận tịnh tiến.
Quay hệ quy chiếu O’i vừa nhận được một góc quanh trục z’i bằng ma trận quay.
Nhân hai ma trận này với nhau có ma trận biến đổi thuần nhất của bước này như sau:
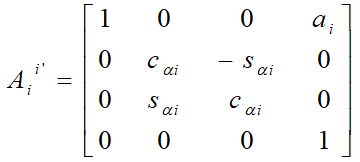
Tịnh tiến hệ quy chiếu O’i theo trục x’i một lượng ai bằng ma trận tịnh tiến. Quay hệ quy chiếu nhận được ở bước trên quanh trục x’i góc để hoàn thiện.
- Nhân hai ma trận này với nhau có ma trận biến đổi thuần nhất của bước này như sau:
- Ma trận biến hình tổng hợp đạt đựơc bằng cách nhân hai ma trận trên có dạng:
Có một số trường hợp đặc biệt của quy tắc DH như sau:
– Các hệ quy chiếu được định vị dựa vào giao điểm của đường vuông góc chung giữa hai trục quay, vậy trong trường hợp hai trục quay song song với nhau có thể tùy ý chọn vị trí gốc hệ quy chiếu. Đồng thời trong trường hợp đó việc quay quanh trục x là không cần thiết.
-Trong trường hợp hai trục quay giao nhau, lượng tịnh tiến theo phương trục x bằng không



















{kind=link}