Nên chọn bánh cước (chổi cước) và đai nhám (băng nhám) để loại bỏ gỉ sét?
Việc chọn giữa bánh cước (chổi cước) và đai nhám (băng nhám) để loại bỏ gỉ sét phụ thuộc vào...
Read more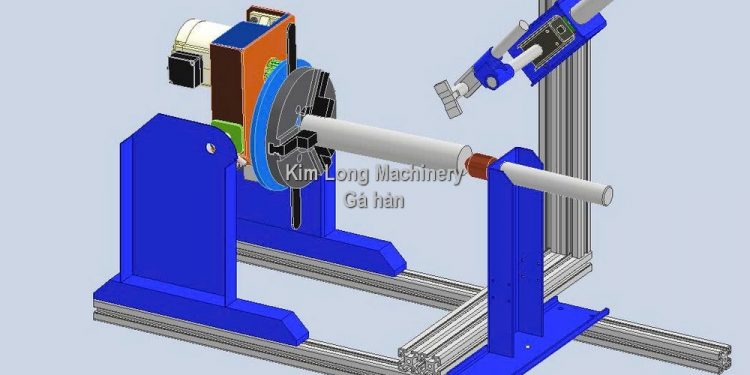













Việc chọn giữa bánh cước (chổi cước) và đai nhám (băng nhám) để loại bỏ gỉ sét phụ thuộc vào...
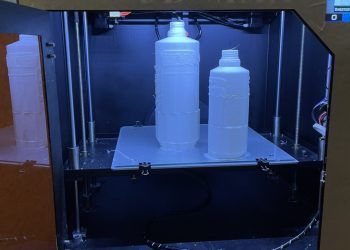
Read moreVới nhu cầu định lượng thể tích chất lỏng một cách chính xác, khách hàng phải thông qua thiết bị...
Read moreHọc sinh thời hiện đại không còn các thú vui đơn giản như trước, một số bạn học sinh đã...
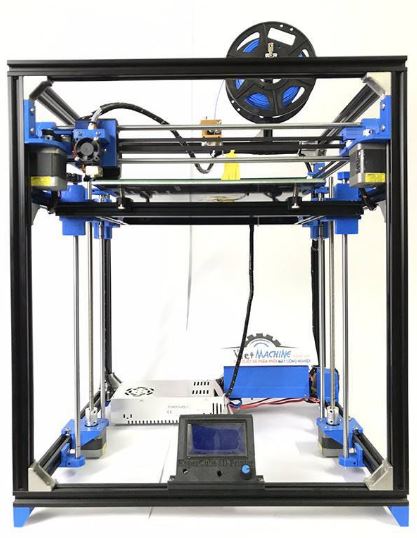
Read moreHọc sinh sinh viên là đối tượng rất thích hợp tiếp cận với máy in 3d sớm, bởi đây là...
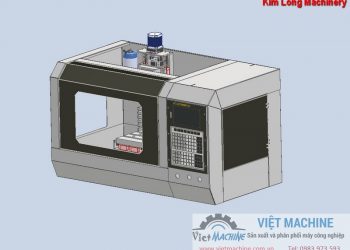
Read moreDòng máy in được thiết kế riêng dảm bảo các yêu cầu kỹ thuật, ngoại hình bắt mắt đảm bảo...
Read more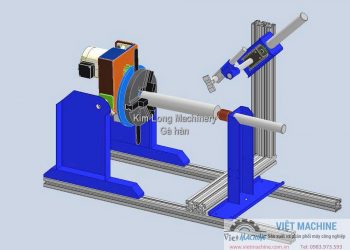




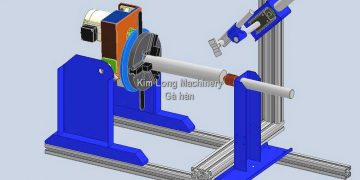
1. Hàn hồ quang tay (Shielded-Metal Arc Welding - SMAW) Đây là quy trình hàn thủ công sử dụng điện...
Read more
© 2021 Kỹ Thuật Chế Tạo - Phát Triển Công Nghiệp