
Sự điếu khiển làm việc theo nguyên tắc Nhập-Xử lý-Xuất:
- Nhập tín hiệu, thí dụ như qua nút bấm, công tắc áp lực và cảm biến…
- Xử lý tín hiệu, thí dụ như qua liên kết với một rơ le
- Xuất tín hiệu, thí dụ ở một động cơ truyển động
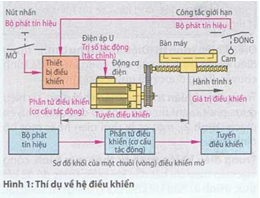
Để truyền động bàn máy (Hình 1), động cơ điện khởi động bằng một nút ấn qua thiết bị điểu khiển và kéo trục chính chạy. Bàn máy chạy cho tới khi cam đạt đến công tắc giới hạn và tạo ra tín hiệu DỪNG. Sự sai lệch của quãng đường chạy được cài đặt trước do hỏng hóc của một hoặc vài bộ phận trên máy thường không được ghi lại hoặc hiệu chỉnh. Quá trình Đóng và Mở này gọi là điều khiển.
Các khái niệm cơ bản
Các thành phần của hệ thống điều khiển được diễn tả bằng những khái niệm tiêu chuẩn hóa (Hình 1):
Công tắc MỞ là bộ phát tín hiệu, thiết bị điều khiển là phẩn tử điều khiển (cơ cấu tác động), điện thế u để điều khiển động cơ điện là biến điều khiển (trị số tác động). Hành trình s của bàn máy được gọi là giá trị điều khiển (trị số điều khiển). Các đơn vị của máy chịu ảnh hưởng bởi tín hiệu vào được gọi là tuyến điều khiển. Toàn bộ hệ thống, gọi tất là hệ điều khiển, có thể được trình bày qua một sơ đổ khối đơn giản hóa, trong đó mỗi phần tử riêng rẽ của điểu khiển được biểu thị bằng khối chữ nhật (Hình 1). Dòng tín hiệu giữa các khối được trình bày qua các đường tác động. Không có tác động ngược lại (sự phản hổi) từ giá trị điều khiển đến giá trị tác động. Do đó người ta gọi đây là một chuỗi điều khiển mở hay một một trình tựtác động mở.
Thí dụ về một hệ điều khiển (Hình 2)
Trong điều khiển, sự sai lệch giữa giá trị thực tế và giá trị đặt trước không được hiệu chỉnh.
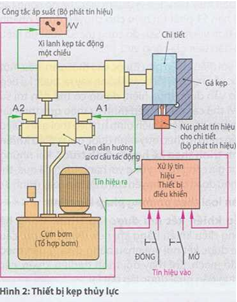
Pittông của xi lanh kẹp chỉ được phép chạy ra khi có chi tiết gia công trong gá kẹp VÀ nút MỞ được nhấn xuống. Sự kết nối hai tín hiệu vào này sẽ mở van dẫn hướng đễ xi lanh chạy tới (Trang 453). Khi lực kẹp đạt đến mức xác định, công tắc áp suất phát ra tín hiệu để gia công chi tiết. Qua nút ĐÓNG và tín hiệu A2 xi lanh sẽ được điều khiển trở lại.
Các loại điều khiển
Các loại điều khiển được phân biệt theo phương pháp xử lý tín hiệu và lập trình.
Phân loại theo phương pháp xử lý tín hiệu Điều khiển kết hợp lôgic: Để khởi động động cơ dẫn tiến của bàn máy (AI), lưới che chắn bảo vệ (SI) phải được đóng kín, bàn máy tại vị trí cuối (S2) và nút (S3) phải được tác động (Hình 1).
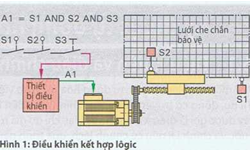
Như vậy ba tín hiệu vào phải được kết nối lôgic VÀ với nhau để có tín hiệu ra A1.
Trong điều khiển kết hợp lôgic, điều kiện đóng mở chỉ được đáp ứng khi các tín hiệu kết nối lôgic với nhau.
Điều khiển trình tự (Điều khiển chu trình).Trong điều khiển trình tự của một công việc, quá trình chuyển động được giải quyết từng bước.
Trong điều khiển trình tự theo thời gian, tín hiệu được phát ra thí dụ qua một cơ cấu cam chuyển mạch (Hình 2), một rơ le thời gian hoặc một bộ định thời.

Trong điều khiển trình tự theo quy trình, công việc tiếp theo chỉ bất đầu khi bước trước đó đã kết thúc (Hình 3).
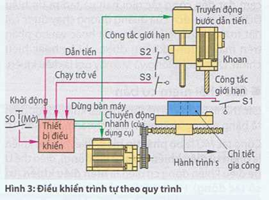
Sau khi khởi động bằng nút công tắc SO, bàn máy tiến đến vị trí làm việc.Tại đó công tắc giới hạn S1 phát tín hiệu cho chuyển động nhanh của đơn vị khoan. Sau đó công tắc S2 xuất tín hiệu cho dẫn tiến gia công w…
Đối với điều khiển phụ thuộc vào thời gian, nếu một bước vận hành bị lỗi hoặc không xảy ra, bước kế tiếp theo vẫn được thực hiện, do đó có thể dẫn tới sự cố. Vì thế các điểu khiển trình tự theo quy trình an toàn hơn các điều khiển trình tựtheo thời gian. Điểu khiển trình tự theo quy trình được gọi là điều khiển hành trình theo kế hoạch định trước, khi những bước gia công tương ứng với hành trình đã qua, thí dụ như đoạn dịch chuyển của một bàn máy (Hình 3).
Phân loại theo phương pháp lập trình
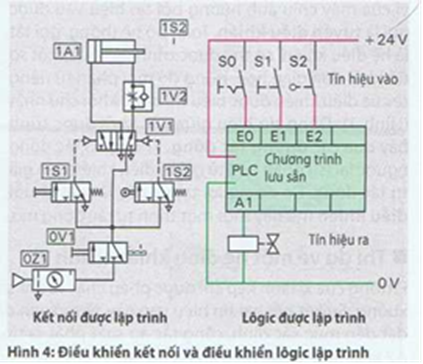
Điều khiển kết nối được lập trình.
Trong hệ thống điều khiển bằng khí nén (Hình 4), các cấu kiện được kết nối với nhau bằng đường dẫn theo sơ đổ mạch.
Khi thay đổi trình tự điều khiển, các đường dẫn phải được lắp đặt lại.
Đối với điều khiển kết nối được lập trình, quy trình hoạt động được xác định trước qua các cấu kiện và kết nối của chúng.
Điều khiển lập trình theo chương trình lưu trong bộ nhớ, hay còn gọi là điều khiển ỉôgic lập trình
(PLC). Đối với điều khiển lôgic lập trình (Hình 4) trình tự điểu khiển được thiết lập qua một chương trình (Trang 514).



















{kind=link}