
Trong điểu khiển trình tự, các bước riêng rẽ được thực hiện nối tiếp nhau theo chuỗi thứ tự cố định. Điểu khiển trình tự có thể thực hiện theo thời gian hoặc tùy thuộc vào quy trình (kết quả của các bước điều khiển trình tự).
Thí dụ: Máy trộn màu (Hình 1).

Hai thành phẩn màu được đưa vào bình trộn màu. Các thành phẩn được trộn trong một thời gian xác định và sau đó hỗn hợp trộn được xả ra ngoài.
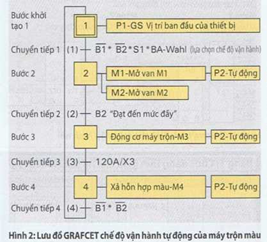
Van điện từ M1 và M2 mở sau khi tín hiệu khởi động được kích hoạt qua nút S2. Các thành phẩn màu được cấp vào máy trộn cho đến mức tối đa và được cảm biến B2 ghi nhận. Sau đó cả hai van đóng lại, động cơ M3 của máy trộn hoạt động và sau 2 phút sẽ tắt. Màu thành phẩm được máy bơm có gắn động cơ M4 bơm ra cho đến khi bổn trống. Trạng thái này được cảm biến B1 ghi nhận.
Các điều kiện phụ. Hệ thống thiết bị phải được vận hành tự động và bằng tay thông qua công tắc quay S2. Nút STOP S3 (thường đóng) kết thúc vận hành tự động. Có thể làm trống bổn bằng tay với nút S4 độc lập với quá trình hoạt động. Khi hệ thống thiết bị ởtại vị trí ban đẩu (GS), đèn báo màu xanh P1 có tín hiệu. Khi hệ thống thiết bị hoạt động trong chế độ “tự động”, đèn báo màu xanh P2 có tín hiệu “1 “và sáng lên. Quá trình điều khiển chế độ tự động được mô tả với biểu đổ GRAFCET theo tiêu chuẩn DIN EN 60848 (Hình 2).VỚi”Chọn-BA”trong bước chuyển tiếp 1, sẽ bắt đầu quá trình theo chế độ tự động hoặc bằng tay.
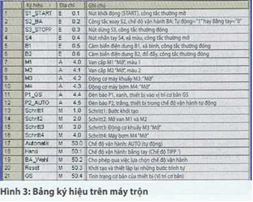
Bảng ký hiệu gồm có các biểu tượng mô tả vị trí của cổng vào và cổng ra trên bộ điều khiển lập trình (Hình 3).
Điều khiển trình tự cũng có cấu trúc tương tự như điều khiển liên kết. Những phẩn tử chính được liệt kê sau đây:
Loại vận hành (Bằng tay hoặc tự động)
Chuỗi (thứ tự) bước với bộ đếm bước
Phát lệnh với hành động
Bộ phận báo cho biết trạng thái và lỗi nếu có
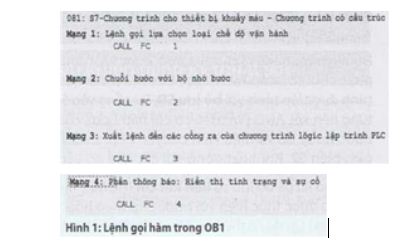
Lập trình có cấu trúc: Để có thể tái lập cấu trúc này một cách tổng quan trong chương trình của bộ điều khiển lôgic lập trình, cẩn bổ sung thêm các môđun chương trình khác trong môđun tổ chức OB1 (giao diện ở giữa chương trình ứng dụng và hệ điều hành) của bộ điểu khiển lập trình (Hình 1, trang 521). Những mô đun này được gọi là chức năng FC và có thể được lập trình tự do trong chương trình điều khiển từ người ứng dụng.
Chế độ TIPP: chế độ vận hành, trong đó lệnh chỉ có tác động khi bộ phát lệnh dược xác nhận (giữ, ấn vào)
Qua việc sử dụng các chức năng, việc thao tác (xử lý) liên tiếp theo từng hàng của từng dòng lệnh đơn lẻ hay mạng lưới trong môđun tổ chức OB1 được thay đổi. Những mệnh lệnh của chương trình trong các hàm (chức năng) FC1, FC2, được xử lý lẩn lượt trong một quy trình.
Với cấu trúc này chương trình tổng thể sẽ trở nên rõ ràng và khiến cho việc tìm kiếm lỗi dễ dàng hơn.
Lệnh “call” từ chương trình AWL (Danh Sách Câu Lệnh). Trong các chức năng FC1, FC2 v.v… người ta sử dụng ngôn ngữ FUP (Sơ đồ chức năng).
Chức năng FC1: Chọn lựa chê độ vận hành (Hình 2)

Qua biến số “BA_Wahl”ta có những điểu được chấp nhận cho từng bước riêng rẽ:
Chế độ vận hành tự động: Nút nhấn S2 cho việc lựa chọn chế độ vận hành qua giá trị “1 “và tác động nút khởi động SI.
Chế độ vận hành bằng tay: ở đây nút nhấn lựa chọn chế độ vận hành tự động S2 phải có giá trị bằng “0” và nút khởi động S1 được tác động. Kết nổi và dẫn đến một hàm được đặt tên là “đánh giá cạnh”, một hình chữ nhật với ‘ằV. Điều này có nghĩa làtừnút khởi động S1, chương trình điều khiển lôgic lập trình chỉ ghi nhận (nắm bắt) và đánh giá việc chuyển đổi tình trạng của tín hiệu từ”0″sang”1″. Nếu tiếp tục giữtình trạng ở SI, điểu này không còn giá trị nữa. Nhờ thế mà đạt được việc lúc nào cũng chỉ có một bước được tác động, bước tiếp tục phải theo sự chuyển đổi từ”Aus-0″ sang “Ein-1”.

Khởi tạo và thiết lập lại những bước điều khiển trình tự: Nút dừng S3 là một công tắc thường đóng. Khi tác động S3, E0.3 nhận được tại cổng vào giá trị “0”. Qua phủ định, biến số “Reset” nhận được giá trị “1Người ta có thể thấy tác động trong chức năng FC2 (Hình 3). Qua “Reset”thiết lập lại bước 1, bước khởi tạo. “Reset” bắt buộc cẩn thiết khi khởi động mới vì biến số”Schritt4″của liên kết VÀ với “BA_Wahl” sẽ dẫn đến”0″. Biến số”Schritt4″, bước cuối cùng của trình tự điều khiển, mới có được giá trị “1”sau một lẩn chạy qua.
Bước khởi tạo “SchrittTđem chuỗi bước vể vị trí gốc. Nó có một cấu trúc khác so với các bước tiếp tục của chuỗi trình tự. ở cổng vào s của bộ nhớSR nó có một liên kết HOẶC với liên kết VÀ được nạp trước.
Tình trạng cơ bản của thiết bị (Hình 2).Tình trạng ban đẩu hay vị trí cơ bản của thiết bị được mô tả với biến “GS”, thí dụ như bình chứa “trống”. Nhờ đó cảm biến B1 là công tắc thường đóng có giá trị “1” ở cổng vào E0.5. Nó không được tác động. Điều này cũng tương tự như vậy cho cảm biển B2 ở cổng E0.6.
Chức năng FC2: Chuỗi bước (Hình 1 và Hình 3, Trang 521).

Những bước riêng rẽ của quá trình được lưu trong phẩn chỉ báo bước. Tất cả các bước của chuỗi quá trình được lập trình với bộ lưu SR.Tại cổng vào s, từng liên kết AND (VÀ) đều có chỉ báo bước của bước trước đó và điễu kiện chuyển tiếp, thí dụ, cảm biến S2. Khi hoạt động với các chế độ vận hành, biến số (BA-Wahl) cũng được sử dụng. Tại cổng vào R của bộ lưu có liên kết OR (HOẶC):Tái thiết lập được thực hiện với bước tiếp theo hoặc với “Reset”. Do đó có thể bảo đảm mỗi lần chỉ hoạt động một bước trình tự.
Sự chuyển từ mạng 3 sang mạng 4 được thực hiện thông qua chức năng mở trễ. Qua đó, sự điểu khiển trình tự phụ thuộc quy trình sẽ chuyển sang trình tự phụ thuộc thời gian. Bước trình tự cuối bị hủy bởi “Schrittl” có nghĩa là thiết lập trở lại.
Điều này được gọi là xóa chuỗi theo nhịp. Chỉ với kiểu chuỗi nhịp này mới có thể mô tả quá trình theo biểu đổ GRAFCET.
Chức năng FC3: Phát lệnh (Hình 2)
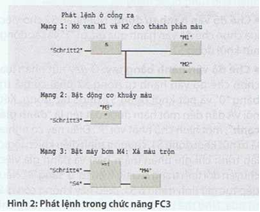
Các bộ chỉ báo bước (cờ, bít nhớ)riêng rẽ, thí dụ “bước 2” được chuyển đến cổng ra của bộ điều khiển lập trình trong FC3. Nhờthế bảo đảm cùng lúc các cổng ra chỉ nhận được lệnh một lẩn trong phạm vi của chương trình và không thể viết đè lên trong phạm vi một chu kỳ của bộ điều khiển lập trình. Nếu van”1M1″vẫn phải tiếp tục hoạt động bên ngoài bước 2, thì bộ lưu SR phải hoạt động hoặc phải sửdụng các phẩn tử điều chỉnh ổn định kép, chẳng hạn van xung 5/2 trong điện – khí nén.
Chức năng FC4: Báo tin (Hình 3)
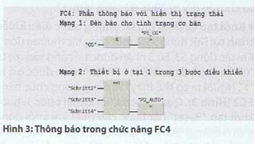
Khi hệ thống thiết bị ở vị trí ban đẩu”GS”,đèn”P1_ GS”sáng. Khi hệ thống thiết bị ở tại một trong ba bước quá trình, đèn “PS_Auto” bật sáng.
Hình 4 cho thấy sơ đồ đấu dây của bài tập.



















{kind=link}