
Chương 2: Động học tay máy.
2.1. Vị trí và hướng của vật rắn trong không gian:
2.1.1. Hệ tọa độ vật:
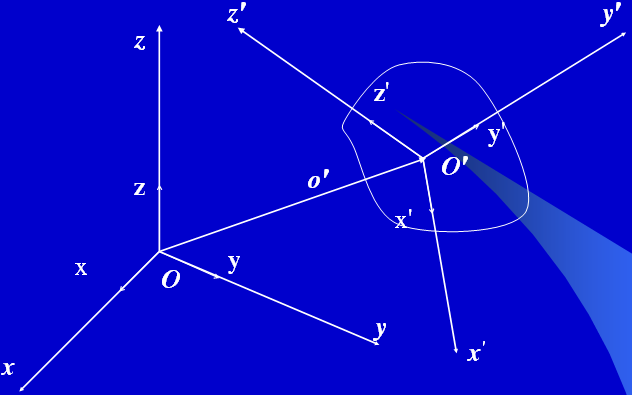
- Một vật rắn trong không gian hoàn toàn xác định nếu vị trí và hướng của nó được mô tả trong một hệ quy chiếu cho trước. Trong hình vẽ dưới đây hệ tọa độ Oyxz với các véc tơ đơn vị là x, y, z được dùng làm hệ quy chiếu gốc. Để mô tả vị trí và định hướng của của vật rắn trong không gian, thường phải gắn lên nó một hệ tọa độ, gọi là hệ quy chiếu địa phương, chẳng hạn hệ tọa độ O’x’y’z’ gốc của hệ tọa độ này đại diện cho vị trí của vật trong hệ quy chiếu gốc Oxyz, biểu thức sau đây nói lên quan hệ giữa chúng:
- Trong đó
 là các hình chiếu vuông góc của véc tơ O’ lên hệ tọa độ Oxyz. Có thể mô tả định vị của điểm O’ qua véctơ O’(3.1) như sau:
là các hình chiếu vuông góc của véc tơ O’ lên hệ tọa độ Oxyz. Có thể mô tả định vị của điểm O’ qua véctơ O’(3.1) như sau:

- Hướng của vật được đại diện bởi các véc tơ đơn vị x’, y’, z’ của hệ quy chiếu O’x’y’z’, và được mô tả bằng quan hệ sau:

- Các thành phần của các véc tơ đơn vị (x’x, x’y, x’z) là cosin chỉ phương của các trục của hệ tọa độ địa phương so với hệ quy chiếu chung.
Hình vẽ dưới đây mô tả vị trí và hướng của vật rắn trong không gian:
2.1.2. Ma trận quay:
- Để cho gọn, 3 véc tơ đơn vị ở trên có thể biểu diễn dưới dạng ma trận (3.3) gọi là ma trận quay như sau:
- Phép quay quanh một trục tọa độ là trường hợp đặc biệt của phép quay một vật quanh một trục bất kì trong không gian, chiều quay được quy ước là dương nếu nhìn từ ngọn về gốc của trục thuộc hệ quy chiếu đang xét thấy ngược chiều kim đồng hồ.
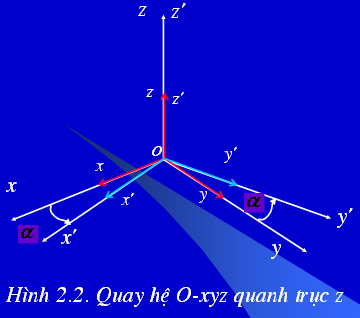
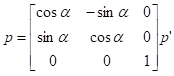
- Giả sử hệ O’x’y’z’ nhận được do quay hệ Oxyz quanh trục z một góc , véc tơ đơn vị của hệ này được biểu diễn trong hệ Oxyz như sau:

- Lần lượt ma trận quay quanh trục z, trục y, trục x của hệ quy chiếu O’ so với hệ O có dạng:

- Từ các phép quay căn bản quanh các trục của hệ quy chiếu cho phép thành lập ra các ma trận quay một đối tượng quanh một trục bất kì.
- Cần lưu ý rằng các ma trận này có tính chất trực giao, ta có thể xác định nghịch đảo của nó theo hai cách, hoặc thay góc bằng giá trị đối dấu của nó vào ma trận quay, hoặc chuyển vị ma trận quay đang có.
2.1.3. Quay một véc tơ:
Có thể mô tả phép quay một véc tơ bằng cách sử dụng các ma trận quay nêu trên, hãy xem mô tả của điểm P trong hai hệ quy chiếu trùng gốc như sau:

- Lần lượt mô tả điểm P trong hai hệ tọa độ rồi tiến hành đồng nhất hai tọa độ đó như sau:
- Vì cùng mô tả một điểm nên có đồng nhất thức:
![]()
- Hay cũng có thể biến đổi để có dạng

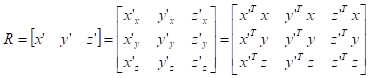
- Nếu viết dưới dạng khai triển ma trận quay có dạng đầy đủ của phép quay như sau:
- Trong đó các cột của ma trận quay chính là các cosin chỉ phương của các cặp trục tương ứng giữa hai hệ quy chiếu. Vì 3 trục của một hệ quy chiếu có quan hệ đôi một vuông góc nên 9 thành phần của ma trận quay chỉ có ba thành phần thực sự độc lập tuyến tính.
- Tóm lại ma trận quay R có 3 ý nghĩa tương đương nhau:
- Biểu diễn hướng giữa hai hệ tọa độ trong đó các cột của ma trận quay là cosin chỉ phương giữa các trục tọa độ tương ứng của hai hệ mới và cũ.
- Biểu diễn sự chuyển đổi tọa độ của một véc tơ giữa hai hệ tọa độ có gốc trùng nhau.
- Biểu diễn phép quay của một véc tơ trong cùng một hệ quy chiếu.
2.2. Quay một véc tơ quanh một trục bất kì:
2.2.1. Tổng hợp các ma trận quay:
Trong quá trình biến đổi đồ họa hoặc nhận diện các đối tượng trong không gian, các phép quay có thể không thực hiện đối với trục cơ sở là trục cơ bản của hệ quy chiếu, mà quanh một trục quay bất kì. Khi đó để thực hiện được phép quay cần biết 2 điểm cơ bản sau đây:
- Việc quay quanh một trục bất kì có thể tương đương với nhiều lần quay quanh các trục cơ bản của hệ quy chiếu, mà mỗi phép quay quanh các trục cơ bản của hệ quy chiếu đượcđặc trưng bởi ma trận Ai tương ứng có dạng đã nêu trên.
- Việc biểu diễn một loạt các thao tác biến đổi quay được thực hiện bằng cách nhân liên tiếp theo đúng trật tự các ma trận đặc trưng cho từng bước.
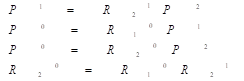
Nếu kí hiệu Pi là điểm P biểu diễn trong hệ quy chiếu i, còn là biểu thị ma trận quay của hệ i so với hệ j. Hãy xem chuỗi quan hệ sau:
2.2.2. Phép quay quanh trục bất kì:
Đây là một trường hợp thường xuyên gặp khi mô tả động học tay máy, về cách thức thực hiện phải nắm được ý tưởng như sau:
1- Biến đổi trục quay so với hệ quy chiếu (hoặc biến đổi hệ quy chiếu so với trục quay) bằng ma trận quay tiêu chuẩn trình bày ở trên sao cho đường đóng vai trò trục quay về trùng với 1 trong 3 trục cơ bản của hệ quy chiếu, gọi A1 là ma trận được sử dụng ở bước này.
Ở đây cần chú ý rằng nếu biến đổi trục quay giữ nguyên hệ quy chiếu, ma trận A1 là ma trận tiêu chuẩn đã trình bày ở trên, còn nếu biến đổi hệ quy chiếu so với trục quay cố định, phải sử dụng ma trận A1T là chuyển vị (nghịch đảo) của ma trận quay tiêu chuẩn.
Ma trận A1 nói trên trong trường hợp tổng quát luôn là tích của hai ma trận quay tiêu chuẩn quanh 2 trong 3 trục cơ bản của hệ quy chiếu, hãy xem ví dụ sau:
Đường thẳng v trên hình vẽ đóng vai trò trục quay, ở đây không biểu diễn đối tương quay sẽ lấy nó làm cơ sở. Vì v không trùng vào trục cơ bản nào của hệ quy chiếu Oxyz đang xét nên nó bị coi là trục bất kì. Tuy nhiên để mô tả v phải biết trước như hình vẽ. Để đưa được v về trùng với 1 trong 3 trục cơ bản có thể thực hiện như sau:
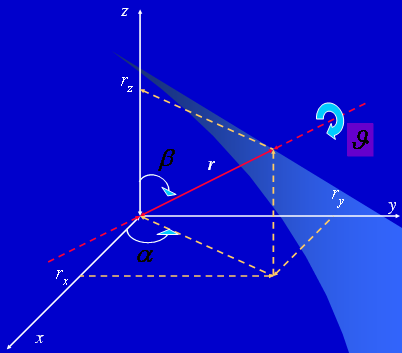
Gọi A2 = Rot(z, – ) là ma trận quay v quanh trục z góc theo chiều kim đồng hồ khi nhìn từ ngọn về gốc trục z. Mục đích của bước này là làm cho v về trùng với mặt phẳng xoz.
Trong mặt phẳng xoz, gọi A3 = Rot(y, -B) là ma trận quay v quanh trục y góc theo chiều kim đồng hồ khi nhìn từ ngọn về gốc trục y. Lúc này v đã trùng với trục Oz, phép quay quanh trục v đã trùng với Oz là phép quay cơ bản đã nói trên. Vậy thao tác biến đổi v về trùng với Oz thực ra gồm hai bước như sau:
A1 = A2A3
Có thể rút ra kết luận rằng để đưa v về trùng với trục Ox hoặc Oy cũng chỉ gồm hai thao tác tương tự, và dữ liệu góc mô tả v như trên là đủ dù đưa v về trùng với bất cứ trục nào.
2- Khi trục quay bất kì đã trùng với một trong ba trục cơ bản của hệ quy chiếu nói trên có thể sử dụng ma trận A4 là ma trận quay tiêu chuẩn để thực hiện phép quay quanh trục v (lúc này đã là trục cơ bản).
3- Trả kết quả về hệ quy chiếu cũ bằng cách thực hiện ngược lại những gì đã làm ở bước 1, ma trận biến đổi ngược là chuyển vị (hoặc nghịch đảo) của ma trận biến đổi thuận.
* Chẳng hạn trong ví dụ trên, để trả kết quả về hệ quy chiếu cũ cần:
Quay v ngược kim đồng hồ quanh trục Oy bằng ma trận A3T.
Quay v ngược kim đồng hồ quanh trục Oz bằng ma trận A2T.
Vậy toàn bộ quá trình mô tả một phép quay góc một đối tượng nào đó quanh trục v bất kì, là một ma trận tổng hợp nhiều bước biến đổi mà trình tự thực hiện có liên quan đến thứ tự sắp xếp của từng ma trận trong một phép nhân sau: ![]()
Hãy nhận xét quy tắc trên và xây dựng cho những trường hợp khác còn lại.



















{kind=link}