
Truyền động của RBCN phần lớn từ động cơ servo (trợ lực) 3 pha có thể điều chỉnh vòng quay được với thắng điện từ. Số vòng quay cao của động cơ điện được giảm tốc mạnh với bộ truyền động bánh răng điểu hòa (Trang 428, hình 1) hoặc bộ truyền động bánh răng cyclo-fine (Hộp số trợ động với bánh răng hành tinh). Người ta có được số vòng quay trong phạm vi từ 0,2 đến 2 vòng quay mỗi giây.
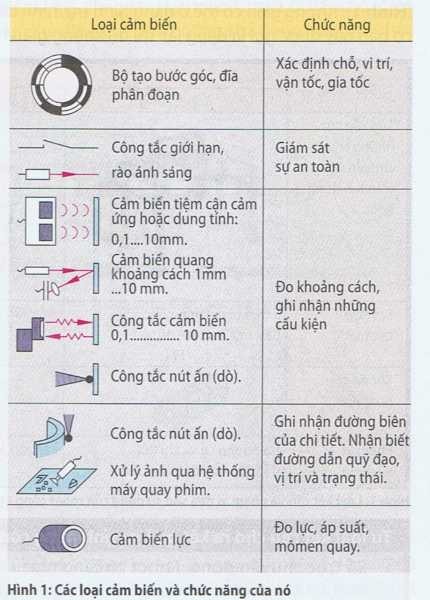
Bộ cảm biến là “giác quan” của robot. Có nhiều bộ cảm biến được đưa vào với các chức năng khác nhau (Hình 1). Những phẩn tửtín hiệu qua tiếp xúc biết được hình dạng và vị trí của chi tiết để gia công. Bộ cảm biến quang hoặc điện hoạt động không tiếp xúc xác định những thông tin từ không gian hoạt động của robot đến điểu khiển, để theo dõi các lực và các chuyển động xuất hiện (Trang 468).
Hệ thống đo hành trình tuyệt đối theo kỹ thuật số (digital) với đỉa phân đoạn nhị phân nấm bắt được vị trí thật của trục quay và trục tịnh tiến.
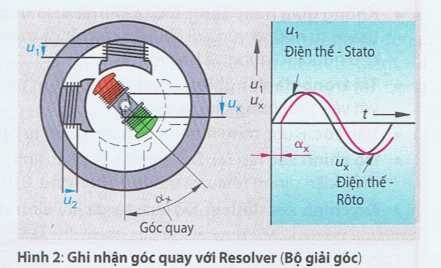
Thiết bị analog thông báo vận tốc góc và vị trí góc, còn gọi là bộ giải góc (Resolver1)) và chiết áp tuyến tính cho những dịch chuyển theo đường thẳng là những thiết bị được sử dụng rộng rãi (Hình 2). Bộ giải góc được gắn trên trục rôto. Nó tương ứng với cơ cấu của một máy phát điện xoay chiều với một cuộn dây rôto và hai cuộn dây stato đặt lệch nhau một góc 90°. Cả hai cuộn dây cố định được cung cấp điện. Khi xoay sẽ cảm ứng trong rotor một điện thế lệch pha. Góc lệch pha a là độ lớn analog của góc quay mỗi trục.



















{kind=link}