
Các bộ phát tín hiệu được phân loại theo công tắc vị trí cơ học (công tắc giới hạn) và cảm biến (Hình 3).

Công tắc vị trí cơ học
Công tắc. Công tắc được sử dụng chủ yếu để khởi động và dừng các quá trình chuyển động và làm việc của máy móc. Chúng là những cấu kiện hoạt động nhị phân. Công tắc được thao tác bằng tay, cơ học, thí dụ như qua cam chuyển mạch, điện từ, khí nén, thủy lực…
Nút nhấn. Chỉ phát tín hiệu trong lúc thao tác. Các van dẫn hướng bằng khí nén hoặc thủy lực cũng có thể sử dụng như nút nhấn (Hình 4).
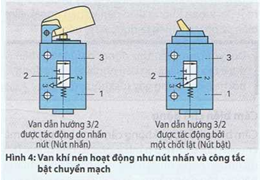
Nút bật. Được cài khi thao tác và sau đó phát tín hiệu liên tục.
Nút NOT-AUS (Nút dừng khẩn cấp). Là nút tác chỉnh với núm thao tác hình nấm, thường có màu đỏ. Sau khi thao tác, nút sẽ ngắt và chỉ được phép mở khóa để hoạt động trở lại sau khi loại trừ các nguy hiểm.
Nút nhấn chỉ phát ra tín hiệu ngấn, nút bật phát ra tín hiệu liên tục.
Công tắc điện (Trang 507) có thể được trang bị với nhiều cặp tiếp điểm, thí dụ như một công tấc thường đóng và một công tắc thường mở hay một bộ chuyển đổi. Nút giới hạn được kích hoạt bởi cơ cấu cam tại các vị trí giới hạn của một cụm lắp ráp. Chúng phải được lắp đặt sao để khi di chuyển chạm nhẹ vào nhau không gây ra hư hại (Hình 5).

Cảm biến (Công tắc tiệm cận)
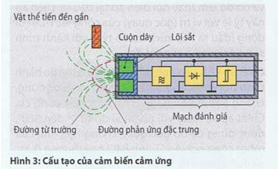
Cảm biến là bộ phận ghi lại trị số đo vật lý dưới dạng giá trị đo từ một quá trình kỹ thuật, chuyển đổi trị số này sang điện áp hoặc dòng điện rồi chuyển đi tiếp để có thể xử lý trong bộ phận tiếp theo (Hình 1).

Cảm biến chuyển đổi giá trị của đại lượng không điện sang đại lượng điện.
Các số đo vật lý có thể được cảm biến ghi lại, chẳng hạn như áp suất, lực, số vòng quay, vận tốc, lưu lượng, nhiệt độ, các trị sổ (kích thước) hình học hoặc các chất của những vật liệu khác nhau.
Cảm biến hoạt động không tiếp xúc. Vì thế chúng không bị mài mòn và không ảnh hưởng đến các trị số điều khiển và điểu chỉnh.
Tùy theo cách tác dụng khi chuyển đổi từ các đại lượng không điện sang các đại lượng điện mà người ta phân biệt cảm biến chủ động và cảm biến thụ động (Hình 2).
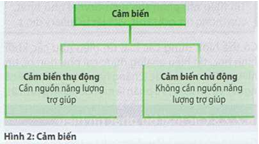
Cảm biến thụ động
Cảm biến được gọi là thụ động khi cần một nguổn năng lượng trợ giúp để hoạt động (chẳng hạn như nguồn điện áp bên ngoài).
Cảm biến thụ động chứa các phẩn tử (linh kiện) chẳng hạn như tụ điện, hoặc cuộn dây để tạo ra điện trường hoặc từ trường nhờ nguổn năng lượng từ bên ngoài (Hình 3).
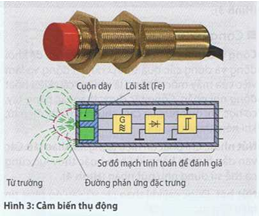
Khi trường này bị tác động từ một đại lượng không điện đến từ bên ngoài, cảm biến sẽ phát tín hiệu ra được xử lý tiếp.
Đối với cảm biến thụ động, đại lượng điện được tạo ra từ nguồn bên ngoài sẽ bị tác động bởi một đại lượng gây rối không điện.
Cảm biến chủ động
Cảm biến chủ động không cẩn năng lượng phụ mà chuyển đổi trực tiếp năng lượng từ bên ngoài (thí dụ như cơ năng, nhiệt năng, hóa năng hoặc quang năng) sang điện năng.
Đối với cảm biến chủ động, điện năng được tạo ra qua sự chuyển hóa năng lượng.
Nhiệt kế, quang kế hoặc phần tử điện piezo là những phần tử tạo ra điện áp.Thídụ nhưtrong lò tôi, cặp nhiệt (được hàn lại từ sắt và constantan) chuyển đổi nhiệt năng thành điện năng, ứng suất nhiệt (nhiệt điện áp) được tạo ra từ nhiệt năng cung cấp dữ liệu về nhiệt độ trong lò (Hình 4).

Không chỉ phân biệt giữa cảm biến chủ động và thụ động, cảm biến còn được phân theo loại tín hiệu phát, bao gồm
- Cảm biến analog
- Cảm biên nhị phân
- Cảm biên digital
Cảm biến analog
Cảm biến analog cung cấp tín hiệu analog ở đẩu ra để tiếp tục xử lý.
Cảm biến sử dụng với biến trở (chiết áp) tuyến tính (Hình 1) hoặc biến trở (chiết áp) quay (Hình 2)là loại cảm biến tín hiệu analog, thụ động, được sửdụng để đo góc, đoạn đường, khoảng cách, bề dày…

Loại cảm biến này được cung cấp điện áp một chiều từ chiết áp kế được sử dụng như một bộ chia điện áp. Qua vật đo, công tắc trượt di động (đẩu rà tiếp xúc) trong chiết áp kế chuyển động và do đó làm thay đổi điện áp tại đẩu ra. Điện áp này tỷ lệ với vị trí (góc quay) của công tắc trượt di động (đẩu rà tiếp xúc), do đó tỷ lệ với hành trình s và góc quay cp của vật đo.
Chiết áp kế tuyến tính thông dụng có thể đo hành trình trong khoảng 5 – 4.000 mm, và được dùng, chẳng hạn để đo hành trình bàn máy công cụ. Chiết áp kế quay với phạm vi đo từ 0° đến 360°, được dùng để đo góc quay, chẳng hạn như của robot công nghiệp (Trang 340) hay thường được sử dụng trong kỹ thuật đo.
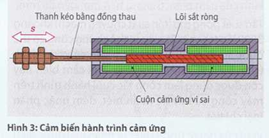
Cảm biến hành trình cảm ứng (Hình 3) gồm phần tử chính là cuộn dây kép với lõi sất (Lõi ferit, lõi từ tính), được cấp điện xoay chiểu. Khi lõi sắt di chuyển trong cuộn dây, sự thay đổi cảm ứng trong các nửa cuộn dây tỷ lệ với sự thay đổi hành trình.Thí dụ, chúng được sử dụng làm đẩu dò để đo chiểu dày của chi tiết, làm bộ cảm biến hành trình trên các máy công cụ cỡ nhỏ hoặc tay cẩm (Dụng cụ kẹp chặt) của rô bốt.
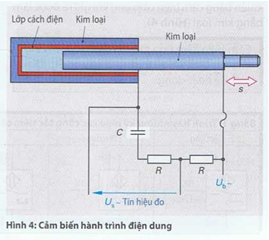
Cảm biến hành trình điện dung (Hình 4) sử dụng tụ điện làm phẩn tử cảm biến chính. Sựdi chuyển của cẩn đo làm thay đổi điện dung của tụ điện và được sử dụng làm tín hiệu đo. Cảm biến hành trình điện dung được sử dụng thí dụ như trong máy cắt bằng tia laser để đo và điều chỉnh khoảng cách giữa béc cắt và chi tiết.
Với cảm biến analog, các đại lượng vật lý, thí dụ như đoạn đường hoặc góc quay có thể được chuyển thành các đại lượng điện analog như điện áp và dòng điện.
Cảm biến nhị phân
Cảm biến nhị phân là loại cảm biến thụ động, cung cấp tín hiệu nhị phân ở đẩu ra.Tín hiệu đẩu ra của cảm biến được mắc nối tiếp với tải (Hình 1).
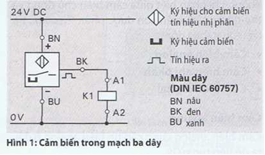
Khi tín hiệu vào đạt đến giá trị ngưỡng cho trước, mạch sẽ mở. Khi tín hiệu rời xa, tín hiệu đóng giảm xuống giới hạn dưới dẫn đến đóng mạch. Sự chênh lệch giữa ngưỡng tín hiệu mở và tín hiệu đóng được gọi là độ lệch đóng – mở (Khe vi sai hay khoảng cách chuyển mạch) (Hình 2).
Mọi tín hiệu nhị phân đểu có khe vi sai (độ lệch giữa hai trạng thái chuyển mạch).
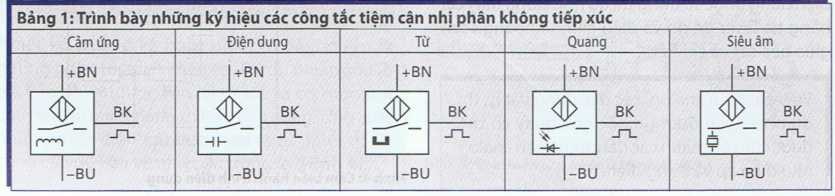
Phân loại cảm biến theo nguyên lý đo (Bảng 1):
- Cảm biến cảm ứng
- Cảm biến điện dung
- Cảm biến tư
- Cảm biến quang
- Cảm biến siêu âm
Cảm biến cảm ứng tạo ra một từ trường khuếch tán (trường rò). Vật thể bằng kim loại tiến đến bể mặt hoạt động (đang được kích hoạt) của cảm biến sẽ gây nhiễu loạn từ trường và do đó kích hoạt đóng mở (Hình 3).
Khoảng cách đóng mở tối đa tương đương với bán kính của cảm biến, thường từ 4 mm đến 80 mm. Tẩn suất đóng mở (tẩn suất chuyển mạch) khoảng 3000 lẩn trong một giây, vì thế chúng cũng có thể được sử dụng để giám sát và đo số vòng quay (cảm biến xẻ rãnh). Ngoài ra, loại cảm biến này còn được dùng làm công tắc cuối hành trình trên máy công cụ hay để nhận biết, đếm hoặc phân loại chi tiết.
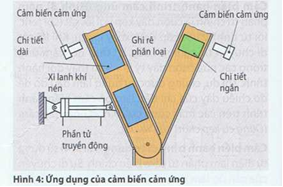
Vị trí của ghi rẽ trong thiết bị phân loại được điều khiển bằng cảm biến cảm ứng khi ghi rê được làm bằng kim loại (Hình 4).
Cảm biến cảm ứng tạo ra trường rò (trường khuếch tán). Khi từ trường bị gây nhiễu, cảm biến sẽ hoạt động.

Cảm biến điện dung tạo ra điện trường rò. Do vật thể, kể cả vật thể phi kim loại, tiến đến gần bề mặt hoạt động của cảm biến thì điện trường bị nhiễu và kích hoạt công tắc. vỏ ngoài của cảm biến điện dung có hình thức tương tự cảm biến cảm ứng (Hình 1).
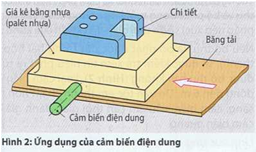
Phạm vi tác dụng (khoảng chuyển mạch) tùy thuộc vào vật liệu của đối tượng đo, thường trong khoảng 2 mm đến 40 mm. Cảm biến ghi nhận kim loại và phi kim loại, kể cả chất lỏng, vật chất dạng hạt và bột, chẳng hạn các tấm đế (palét) nhựa trên dây chuyền lắp ráp (Hình 2) hoặc đo mức chất lỏng.
Cảm biến điện dung tạo ra một điện trường rò. Khi nó bị nhiễu, cảm biến sẽ đóng mở.
Cảm biến từ (Công tắc Reed) là những cảm biến cảm ứng đặc biệt và được sử dụng như các công tắc giới hạn trong xi lanh khí nén (Hình 3).
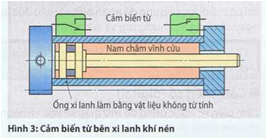
Chúng được gắn trực tiếp trên thân xi lanh. Xuyên qua lớp vỏ, cảm biến phát ra một tín hiệu khi một nam châm vĩnh cửu gắn trong ti pittông tiến đến gẩn. Vì thế vị trí giới hạn của ghi rẽ trong hình 4, trang 470 cũng có thể được điểu khiển bằng cách kiểm tra vị trí giới hạn của pittông xi lanh khí nén.
Cảm biến từ tính được tác động bằng nam châm vĩnh cửu.
Cảm biến quang
Cảm biến điện quang được chia thành ba nhóm tùy theo cấu tạo và nguyên lý tác động (Hình 4).

- Công tắc quang (cảm biến ánh sáng)
- Rào chắn ánh sáng phản xạ
- Rào chắn ánh sáng một chiều
Công tắc ánh sáng có bộ phát và thu được đặt chung với nhau. Xung bức xạ hổng ngoại phát ra từ diode sẽ phản xạ khi có một vật thể tiến đến gần và được transistor quang tiếp thu và tiếp tục xử lý. Phạm vi nhận biết đến 2m và tùy thuộc nhiều vào đối tượng.
Rào chắn ánh sáng phản xạ cũng có bộ phát và thu đặt trong một hộp chung. Xung ánh sáng phát ra từ bộ phát được tấm phản xạ đặt đối diện phản xạ trở lại. Phạm vi tác dụng khoảng 5 m.
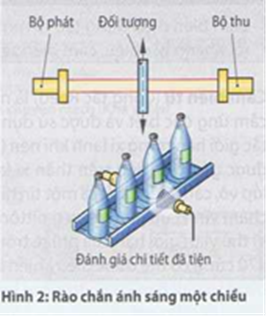
Rào chắn ánh sáng một chiểu gổm bộ phát và thu đặt trong hai hộp riêng biệt. Khi tia sáng ở giữa bộ phát và thu bị gián đoạn, tín hiệu sẽ được phát
ra. Loại này có phạm vi sử dụng đến 40 m.
Phạm vi ứng dụng của cảm biến quang khá rộng, chẳng hạn như chức năng đếm trong các thiết bị băng tải, giám sát vật liệu trên các dây chuyển vận chuyển, theo dõi dụng cụ trên các máy công cụ (kiểm tra gãy mũi khoan) hoặc theo dõi an toàn trên các máy công cụ (canh chừng phạm vi nguy hiểm).
Cảm biến quang phát ra xung hồng ngoại. Nếu tia sáng bị nhiễu, cảm biến sẽ tác động.
Cảm biến siêu âm phát ra tín hiệu siêu âm (sóng siêu âm) bằng một chấn tử siêu âm, thường là tinh thể thạch anh có tính áp điện (piezoquarz), và đo thời gian phản xạ của xung siêu âm.
Tương tự như cảm biến quang, cảm biến siêu âm cũng có hai loại. Bộ thu và bộ phát trong một hộp chung (kiểu vận hành bằng phương pháp tiếp xúc) sẽ đo thời gian di chuyển của xung siêu âm (Hình 1).

Nếu bộ thu và bộ phát được đặt trong hai hộp riêng biệt (kiểu thanh), sẽ được kiểm tra xem tín hiệu phát ra từ bộ phát có đến được bộ thu hay không (Hình 2).
Loại cảm biến này có tắm hoạt động đến 6 m. Do vận tốc âm thanh chậm hơn nhiều so với ánh sáng, cảm biến siêu âm cẩn thời gian đánh giá kết quả dài hơn cảm biến quang.
Lĩnh vực ứng dụng của cảm biến siêu âm rất rộng. Chúng có thể nhận biết các đối tượng rắn, lỏng, dạng bột và trong suốt, thậm chí có thể được sử dụng để nhận biết vật liệu độc lập với đối tượng ngay cả trong hơi nước, bụi và sương mù.
Cảm biến siêu âm phát sóng siêu âm. Nếu sóng âm thanh bị nhiễu, tín hiệu sẽ được phát ra.
Cảm biến số (digital)
Cảm biến sổ được dùng để thu thập số liệu về hành trình hoặc góc chuyển động và được phân loại theo chế độ:
- Đo hành trình và đo góc tăng dần (theo gia số/gia lượng)
- Đo hành trình và đo góc tuyệt đối
Đo hành trình tăng dẩn (Đo hành trình theo gia số) sử dụng thước vạch bằng thủy tinh với các vạch cho ánh sáng xuyên qua và các vạch ngăn sáng được di chuyển bởi động cơ chỉnh cùng với vật đo. Qua chuyển động này các đường vạch của thước làm gián đoạn nguồn ánh sáng theo chu kỳ (Hình 3).
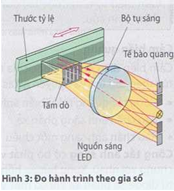
Tín hiệu ánh sáng được diode quang thu nhận và đánh giá (Trang 525).
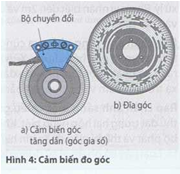
Cảm biến góc quang gia số thường được dùng để đo góc (Hình 4a). Nguyên lý đo tương tự như với thước thẳng. Loại cảm biến này cũng phù hợp để đo hành trình khi chuyển động quay được chuyển thành chuyển động thẳng.
Đo hành trình và đo góc tuyệt đối hoạt động tương tự như đo gia số. Trên thước nguyên tắc số nhị phân ứng với các ô-sáng và tối. Qua đó, mỗi vị trí trên thước tương ứng với một trị số. Để đo góc, có thể sử dụng đĩa chia độ góc (đĩa mã số) (Hình 4b).
Với cảm biến số, các đại lượng đo như hành trình trên máy công cụ hoặc quỹ đạo của tay máy rô bốt được thu thập dưới dạng số và được tiếp tục xử lý.


















{kind=link}