- Chuyển động điểm tới điểm PTP (tiếng Anh: point to point): Robot dẫn điểm hoạt động của dụng cụ dọc theo quỹ đạo nhanh nhất để đến điểm cuối. Những trục robot chuyển động quay. Diễn tiến chính xác của chuyển động thì không thể thấy trước được. PTP được chọn ở một dòng trong chương trình (Hình 2).

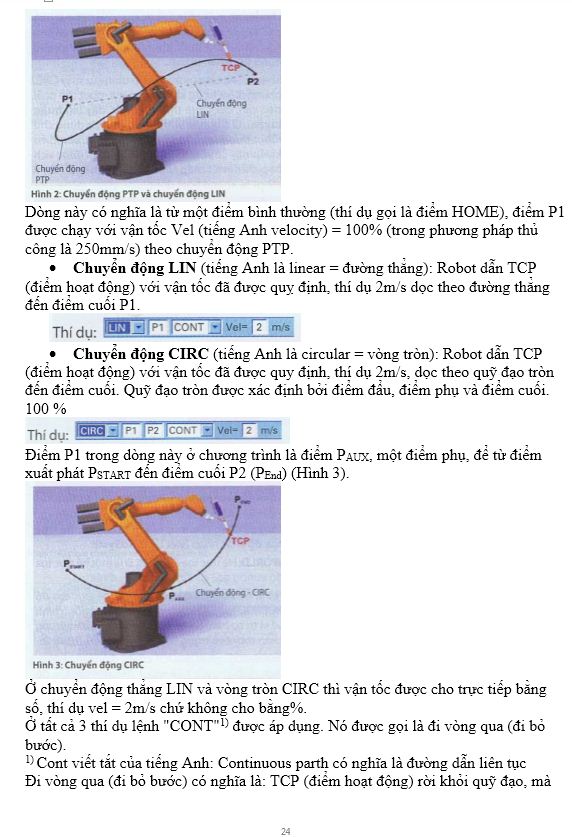

Các loại chuyển động của RBCN





Leave a Reply

- Trending
- Comments
- Latest














{kind=link}
© 2021 Kỹ Thuật Chế Tạo - Phát Triển Công Nghiệp