

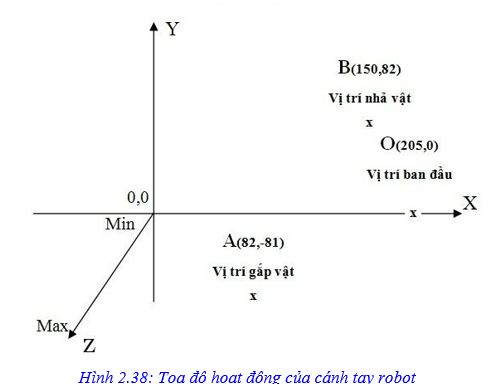
Hoạt động của cánh tay robot
Hoạt động của robot bám theo 3 trục đo là x,y,z. Điểm O có tọa độ ban đầu là O(205,0), từ vị trí điểm O này ta đi đến tọa độ điểm A có tọa độ là A(82,-81), đó là vị trí gắp vật. Từ vị trí A ta đi đến vị trí B có tọa độ B(150,82) đó là vị trí nhả vật. Chu trình sẽ lặp đi lặp lại khi để ở chế tự động.
Mô hình có thể hoạt động ở 2 chế độ:
+ Chế độ điều khiển bằng tay
+ Chế độ điều khiển tự động
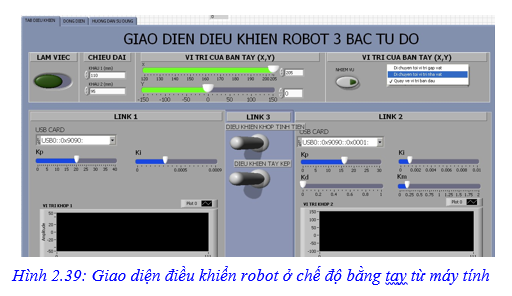
1. Chế độ bằng tay
Từ máy tính chọn các chế độ khác nhau để robot thực hiện các nhiệm vụ ở phần NHIEM VU. Nó có 3 chế độ đó là (Quay ve vi tri ban dau, Di chuyen den vi tri gap vat, Di chuyen den vi tri nha vat) (Hình 2.39).
Modul 1: Đọc hướng dẫn sử dụng cho cánh tay robot
Modul 2: Chọn cổng USB
Modul 3: TAB điều khiển
Chương trình điều khiển cho Font Panel như sau:
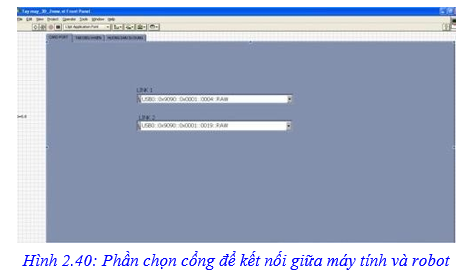
– CARD PORT: phần chọn cổng để kết nối giữa máy tính và cánh tay robot. Phải chọn hai cổng cho Link 1 và Link 2. Link 1: cho khớp 1; Link 2: cho khớp 2.
Phần giao thức này cần phải chọn trước khi làm việc với robot.
2. Chế độ tự động
Modul 1: Đọc hướng dẫn sử dụng cho cánh tay robot
Modul 2: Chọn cổng USB
Modul 3: TAB điều khiển
Chọn nút LAM VIEC sau đó chọn chế độ TU DONG (Hình 2.40)
Chương trình điều khiển cho Font Panel như sau:
– CARD PORT: phần chọn cổng để kết nối giữa máy tính và cánh tay robot. Phải chọn hai cổng cho Link 1 và Link 2. Link 1: cho khớp 1; Link 2: cho khớp 2.
Phần giao thức này cần phải chọn trước khi làm việc với robot.
– TAB DIEU KHIEN: được chia làm bốn phần:
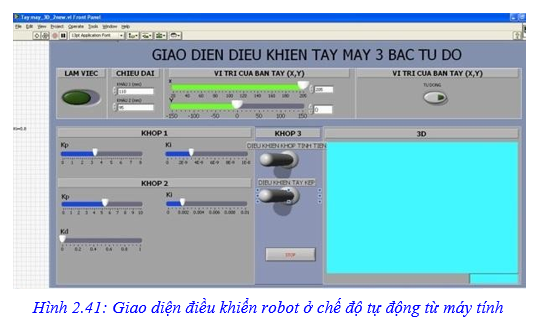
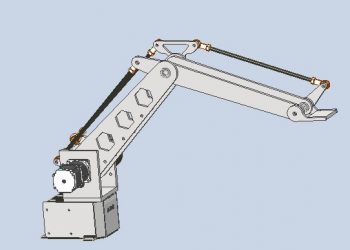
Nút khởi động: sau khi chọn Card Port, di chuyển sang TAB DIEU KHIEN và chọn nút LAM VIEC để cánh tay robot ở vị trí ban đầu có tọa độ O (Hình 2.41, Hình 2.42).
Chọn các thông số Ki, Kp, Kd
Công tắc điều khiển khớp tịnh tiến và tay kẹp Mô phỏng 3D

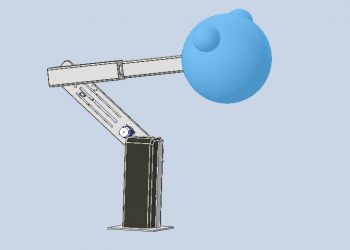
Sau đây là một số hình ảnh thực tế khi làm việc trên mô hình thật (Hình 2.43, Hình 2.44)
+ Một số hình ảnh hoạt động của cánh tay robot ngoài thực tế:




















{kind=link}