
Động học của robot
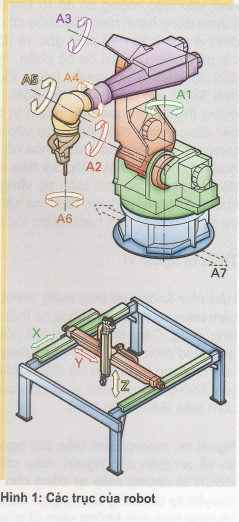
Kết Cấu động học của robot được xác định qua sự xếp đặt (bố trí) và số lượng trục tham gia vào chuyển động. Trục là thành phần được dẫn hướng và truyền động độc lập với nhau, ở RBCN những trục này có nhiệm vụ làm cho cơ cấu chấp hành cuối (chi tiết/dụng cụ của robot) có thể chuyển động trong không gian. Những thiết bị phụ trợ cho robot, thí dụ như tay gắp, không được kể là trục. Người ta phân biệt trục quay và trục tịnh tiến (Hình 1). Trục quay được phân chia thành:
■ Trục đứng cũng như trục thẳng hàng
■ Trục nằm ngang hay trục không thẳng hàng (Trục nằm trong một khớp nối quay)
ở trục tịnh tiến có 3 nhóm:
■ Trục trượt (trục xê dịch), không thẳng hàng
■ Trục kính viễn vọng (góc nhìn với đối tượng không đổi), thẳng hàng
■ Trục dịch chuyển, thí dụ như bàn trượt tịnh tiến
Như dáng thiết kế bên ngoài của các robot cho thấy, có nhiều cách cấu tạo khác nhau tùy theo nhà sản xuất. Để có thể so sánh từng robot và tìm được điểm cốt yếu về động học của nó, người ta lập ra những ký hiệu hình ảnh thay thế. Những biểu tượng cho các trục, cơ cấu chấp hành cuối và bệ máy được trình bày trong quy định của VDI 2861 (mô tả động học của RBCN).
 Những biểu tượng thay thế này làm rõ điều phân loại được tả ở trên là luôn luôn có 2 loại thông tin cho một trục. Một mặt là việc xác định rõ ràng qua cách phân loại này rằng trục chuyển động tịnh tiến hay quay. Mặt khác cũng nói lên được ít nhiều thông tin phải có về khớp nối. Chuyển động quay của trục có thể được thực hiện chính xung quanh trục (ở trục thẳng hàng) hay xung quanh khớp nối (ở trục không thẳng hàng) (Hình 1 và 2).
Những biểu tượng thay thế này làm rõ điều phân loại được tả ở trên là luôn luôn có 2 loại thông tin cho một trục. Một mặt là việc xác định rõ ràng qua cách phân loại này rằng trục chuyển động tịnh tiến hay quay. Mặt khác cũng nói lên được ít nhiều thông tin phải có về khớp nối. Chuyển động quay của trục có thể được thực hiện chính xung quanh trục (ở trục thẳng hàng) hay xung quanh khớp nối (ở trục không thẳng hàng) (Hình 1 và 2).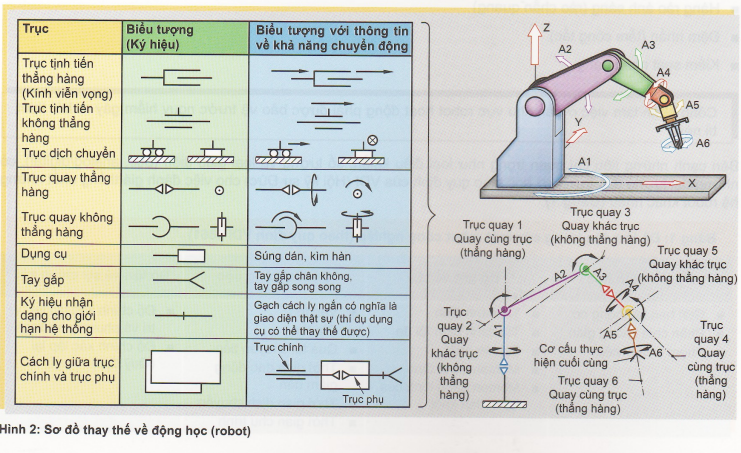
9.2.1 Bậc tự do cùa cơ cấu truyền động
Khi mô tả chuyền động của một vật thể trong không gian, người ta rất thường hay giả định một cách đơn giản xem đây như một điểm (điểm khối lượng). Đó là một sự đơn giản hóa rất giới hạn – dù rằng chỉ là lý thuyết – vì ở một điểm ta đều biết không có giãn nở trong không gian và như thế dĩ nhiên là không có khối lượng. Việc đơn giản hóa này có thể chấp nhận được khi chỉ có vận tốc tức thời cũng như những đoạn đường dịch chuyển cần phải được xác định và qua đó không cần quan tâm tới việc giãn nở của vật thể trong không gian.
Nhờ thế chỉ cần ba tọa độ theo trục X, y và z để định rõ vị trí của điểm khối lượng. Điều này sẽ trở nên khó khăn hơn khi phải lưu ý đến việc giãn nở của vật thể chuyển động trong không gian, thí dụ như trong chuyển động của chi tiết trong không gian.
 Bậc tự do f là số lượng chuyển động độc lập có thể xảy ra. Theo đó một vật thể rắn chuyển động tự do trong không gian có bậc tự do f tối đa bằng 6, bao gồm 3 khả năng chuyển động tịnh tiến và 3 chuyển động quay.
Bậc tự do f là số lượng chuyển động độc lập có thể xảy ra. Theo đó một vật thể rắn chuyển động tự do trong không gian có bậc tự do f tối đa bằng 6, bao gồm 3 khả năng chuyển động tịnh tiến và 3 chuyển động quay.
Khác biệt với bậc tự do của một vật rắn (so sánh trang 263) là khái niệm bậc tự do của cơ cấu truyền động hay bậc tự do của một hệ thống gồm những vật thể rắn. ở đây nói đến nhiều vật thể rắn được sắp xếp nối tiếp hay song song với nhau, được liên kết qua khớp nối. Một hệ thống như vậy cũng thường được gọi là chuỗi vật thể rắn (thí dụ như các trục của một robot).
Một thanh phẳng có ba bậc tự do. Đó là tọa độ của tâm điểm M (x-1, y-|) của thanh phẳng có chiều dài / đã biết để mô tả vị trí của nó. Để mô tả phương hướng người ta sử dụng góc α1 (Hình 1).
Cách mô tả vị trí và phương hướng của thanh thì hoàn toàn tùy ý. Cũng có những khả năng khác để diễn tả vị trí, thí dụ như điểm chuẩn (điểm quy chiếu) của đầu cuối thanh, nhưng tất cả các khả năng này đều có điểm chung là chúng cần ba thóng số độc lập với nhau để xác định vị trí trong mặt phẳng.
Nếu hai thanh phẳng liên kết với nhau qua một khớp nối, điều này cho phép một chuyển động quay (gọi là chuỗi vật thể rắn), như thế chúng có bậc tự do của cơ cấu truyền động bằng 4; có nghĩa là để mô tả rõ ràng vị trí của chuỗi vật thể rắn trong mặt phẳng – với chiều dài đã biết l1 và l2 của hai thanh – chỉ cần thông tin về tâm điểm của thanh /l1 [M (x1, y1)] và góc định hướng α1. Cho việc mô tả thanh l2 chỉ cần góc α2 là đủ để xác định phương hướng của nó (Hình 1).
Tùy theo loại khớp nối (quay hay tịnh tiến, số lượng của khả năng chuyển động) người ta có thể thiết kế chuỗi vật thể rắn khác nhau với bậc tự do của cơ cấu truyền động khác nhau (Hình 2).
9.2.2 Loại cấu trúc và không gian hoạt động
Như đã nhắc đến, cần phải có 6 bậc tự do để sắp xếp một vật thể rắn bất kỳ trong không gian. Điều này đưa đến kết quả là một robot cần ít nhất 6 bậc tự do để có thể bố trí tùy ý một chi tiết cũng như một dụng cụ trong không gian hoạt động của nó. Nếu robot có ít hơn 6 trục, nó không thể tìm ra mỗi một vị trí bắt kỳ trong không gian. Cũng đã được kể ra là 6 bậc tự do này được chia làm 2 nhóm. Một nhóm (x, y, z) được xếp vào khái niệm vị trí, trong khi nhóm kia (A, B, C) được gọi là định hướng.
Việc sắp xếp này cũng được dùng cho việc phân loại đầu tiên của các trục ở robot. Đầu tiên ta cần 3 trục để mô tả vị trí cho một robot. Những trục này được gọi là trục chính. Với sự trợ giúp mô tả động học của các trục chính, việc phân biệt đầu tiên của những hệ thống robot được thực hiện (Hình 1). Để tạo ra việc định hướng của tay gắp cúng như dụng cụ, người ta cần thêm các trục được gọi là trục phụ, cũng còn được gọi là trục bàn tay (tương tự như với con người). Trục chính robot gồm trục tịnh tiến và trục quay. Trục phụ robot, hầu như không có ngoại lệ, là trục quay.
Giới hạn không gian của robot hình thành khi các trục chính chuyển động đến vị trí xa nhất và gần nhất. Qua đó ta có không gian hoạt động của robot. Độ lớn và dạng của không gian hoạt động này là tiêu chí quyết định cho việc lựa chọn robot để giải quyết một vấn đề xử lý thao tác đã đặt ra.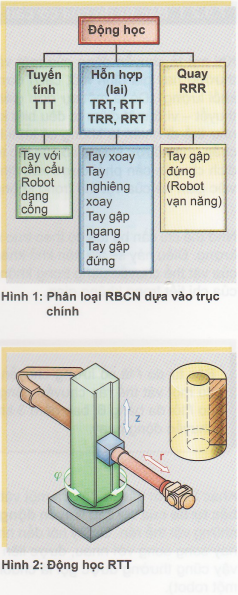 Robot tay xoay
Robot tay xoay
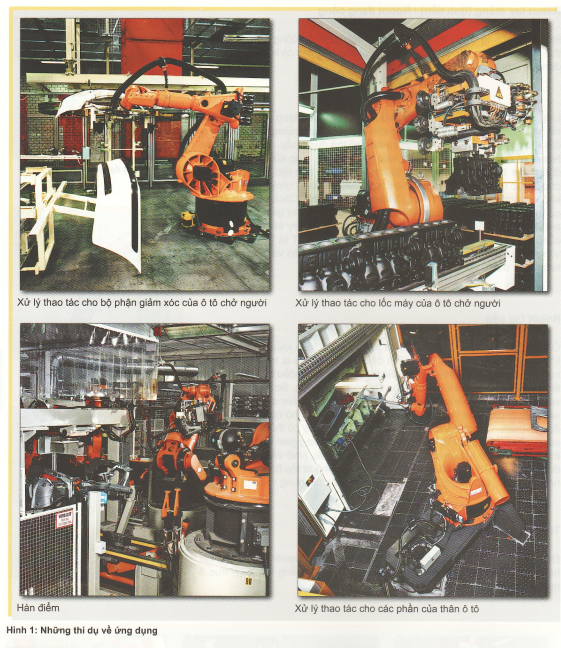
RBCN với các trục có động học RTT1) được sử dụng chính để chất tải và dỡ tải của máy móc vì chúng có tầm hoạt động lớn và dù vậy vẫn tương đối nhanh để có thể quay trục đầu tiên. Không gian hoạt động có dạng hình trụ.
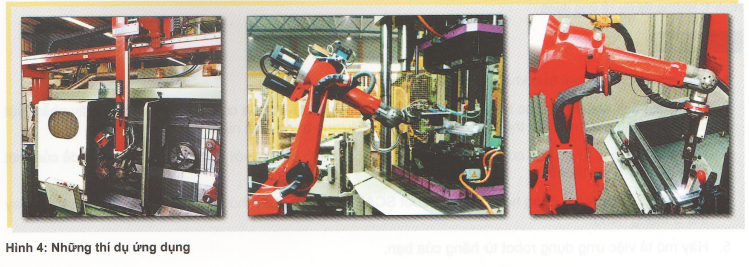
ở RBCN với các trục có động học RRT cũng vậy, trục đầu tiên được cấu tạo là trục quay thẳng hàng. Dạng thiết kế của trục thứ hai và ba khác nhau tùy theo trường hợp ứng dụng. Có loại RBCN (Hình 3) được cấu tạo ở trục thứ hai là trục quay không thẳng hàng, còn trục thứ ba là trục tịnh tiến (loại như kính viễn vọng). Loại RBCN này rất phù hợp cho việc hàn theo quỹ đạo, thường xuất hiện nhiều trong lắp ráp ô tô và chế tạo bình chứa.
Một dạng sắp xếp thường gặp với động học RRT là robot với tay nằm ngang, được gọi là SCARA(2) (Hình 4). ở đây trục thứ hai và ba là trục quay nằm ngang, không thẳng hàng. Trục thứ ba là loại trục chuyển động thẳng (tịnh tiến) được dùng để chỉnh độ cao. Không gian hoạt động được hình thành từ loại động học này có dạng hình trụ. Loại robot này tạo ra lực ghép nối (lực liên hợp, lực ăn khớp, lực ghép đôi) rất lớn. Nhờ thế lĩnh vực ứng dụng chính của loại động học này là trong lắp ráp. Nhờ vào độ chính xác lặp lại cao, hầu như chỉ loại SCARA được sử dụng trong lĩnh vực lắp ráp bản mạch in (gắn bo mạch in).
 RTT: Chữ viết tắt để chỉ loại chuyển động trục robot (R: Rotation = quay; T: Translation = tịnh tiến)
RTT: Chữ viết tắt để chỉ loại chuyển động trục robot (R: Rotation = quay; T: Translation = tịnh tiến)
SCARA là chữ viết tắt cùa tiếng Anh: selective compliance assembly robot arm = Tay máy mềm dẻo tùy ý để lắp ráp
Robot tay thẳng (tịnh tiến) / Robot dạng cổng
Robot tay thẳng có ba trục chính tuyến tính (chuyển động thẳng) và như thế có dạng động học TTT (Hình Ị). Loại sắp xếp này có không gian hoạt động là một khối lập phương (khối vuông).
Loại robot TTT được thực hiện rất phổ biến là robot dạng cổng. Loại này rất phù hợp cho những công việc vận chuyển qua những quãng đường dài vì ứng suất cơ học được hình thành có thể được hấp thu bởi bệ máy. Ngoài ra ở trục tịnh tiến dài, về mặt kỹ thuật đo, việc xử lý thao tác dê dàng hơn là đối với trục quay tương ứng. Nếu chế tạo thêm trục phụ cho 3 trục chính, robot có thể thực hiện được những công việc lăp ghép không nằm chính xác ở 1 trong 3 hướng trục chính. Cách ứng dụng này có thể hợp 2 máy sản xuất với nhau để tiếp nôi nhau gia công một chi tiết (Hình 4). Việc kẹp và tháo trong mâm cặp của máy sẽ do robọt dạng cổng đảm nhận. Một ưu điểm khác của kết cấu TTT là robot năm trên vùng ứng dụng (hoạt động) và do đó khu vực dưới nền và phạm vi trước từng máy được trống để tiếp cận.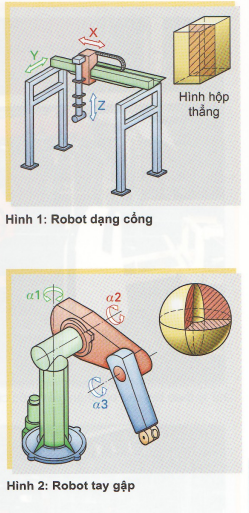 Robot tay gập
Robot tay gập
ở robot tay gập (Hình 2), còn gọi là robot tay nối toàn khớp quay (đòn có khớp bản lề), tất cả các trục chính đều được thiết kế là trục quay (động học RRR). Trong hầu như tất cả các trường hợp, trục đầu tiên là trục nằm thẳng hàng, trong khi trục hai và ba không thẳng hàng, So sánh động học với các loại robot khác, loại RRR có ưu điềm là chiếm chỗ ít nhất dựa vào mặt không gian hoạt động và cần lực tăng tốc nhỏ nhất cho chuyển động nhanh. Qua động học RRR, các robot loại này có thể thực hiện các công việc ở trên đầu mà không gặp vấn đề gì. Không gian hoạt động hình thành qua sự bố trí của các trục có dạng hình cầu. Nhờ vào cách chuyển động, loại RBCN này có thể sử dụng được trong nhiều lĩnh vực tự động hóa như hàn, lắp ráp, gia công, xử lý thao tác nói chung v.v…
Trục định hướng/trục bàn tay
Để định hướng cho một đối tượng xử lý thao tác, người ta thường kết hợp trục 4 quay, thẳng hàng, trục 5 quay, không thẳng hàng và trục 6 quay thẳng hàng (Hình 3).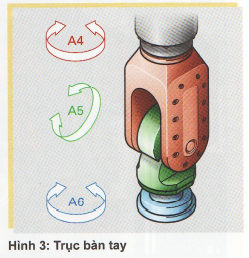
 Bài tập:
Bài tập:
1. Hãy giải thích các loại trục khác nhau của một RBCN.
2. Hãy giải thích khái niệm bậc tự do trong không gian và bậc tự do của cơ cấu truyền động. Hãy phân biệt
sự khác nhau giữa một vật thể rắn và một điểm khối lượng trong khái niệm bậc tự do.
3. Hãy cho biết bậc tự do của cơ cấu truyền động cho ba thanh kết nối với nhau bằng khớp (vấn đề của mặt
phẳng) (hãy phác thảo!)
4. Hãy vẽ sơ đồ thay thế động học cho một robot SCARA với trục quay thứ 4 không thẳng hàng và trục quay thứ 5 thẳng hàng.
5. Hãy mô tả việc ứng dụng robot từ hãng của bạn.
Điều khiển robot
Khác với khi lập trình cho máy CNC (thi dụ như máy phay), lúc thiết lập một chương trình cho một RBCN, một điểm trong không gian hầu như luôn luôn được tìm thấy và lưu trữ qua phương pháp dạy (teach=dạy/ huấn luyện, tiếng Anh). Điều này được thực hiện bằng cách điều khiển RBCN – phần lớn với sự trợ giúp của một cần điều khiển (joystick) ở thiết bị lập trình bằng tay – chạy đến những điềm tương ứng của ứng dụng và lưu trữ những điểm này.
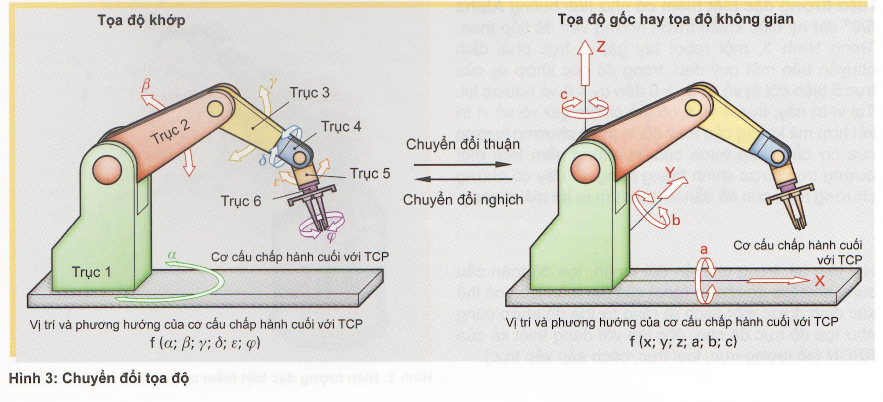
Như đã nhắc đến, để hỗ trợ cho việc mô tả những chuyển động như thế của vật thể rắn, người ta cần một hệ tọa độ để có thể xác định rõ ràng vị trí và phương hướng, về nguyên tắc có nhiều hệ tọa độ có thể giải quyết việc này nhưng được sử dụng nhiều nhất trong kỹ thuật hẳn là hệ tọa độ Descartes (Hình 1). Điều đó có nghĩa là người điều khiển RBCN nắm bắt được vấn đề một cách nhanh nhất trong hệ tọa độ này. Vì thế mà hầu hết các nhà sản xuất robot đều cung cấp hệ tọa độ Descartes làm hệ tọa độ cơ bản (hệ tọa độ gốc/hệ tọa độ chuẩn) hay còn gọi là hệ tọa độ toàn cầu (Hình 1).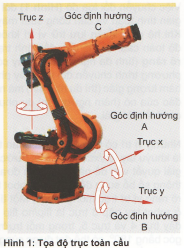 Để thông báo vị trí, người ta thường dùng một điểm làm điểm chuẩn được gọi là điểm hoạt động (trung tâm) của dụng cụ hay tâm điểm dụng cụ (TCP: Tool Center Point) nằm ở tâm của tay gắp. Đẻ mô tả phương hướng của tay gắp, người ta lại sử dụng một hệ tọa độ khác được đặt qua TCP và như thế mô tả góc định hướng đến hệ tọa độ cơ bản. Do đó vị trí của một vật thể rắn đang giữ chặt tay gắp được trình bày qua 6 thông số như sau:
Để thông báo vị trí, người ta thường dùng một điểm làm điểm chuẩn được gọi là điểm hoạt động (trung tâm) của dụng cụ hay tâm điểm dụng cụ (TCP: Tool Center Point) nằm ở tâm của tay gắp. Đẻ mô tả phương hướng của tay gắp, người ta lại sử dụng một hệ tọa độ khác được đặt qua TCP và như thế mô tả góc định hướng đến hệ tọa độ cơ bản. Do đó vị trí của một vật thể rắn đang giữ chặt tay gắp được trình bày qua 6 thông số như sau: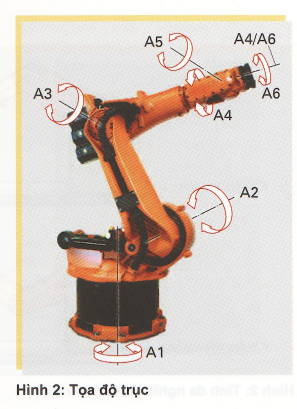 Để thông báo vị trí, người ta thường dùng một điểm làm điểm chuẩn được gọi là điểm hoạt động (trung tâm) của dụng cụ hay tâm điểm dụng cụ (TCP: Tool Center Point) nằm ở tâm của tay gắp. Để mô tả phương hướng của tay gắp, người ta lại sử dụng một hệ tọa độ khác được đặt qua TCP và như thế mô tả góc định hướng đến hệ tọa độ cơ bản. Do đó vị trí của một vật thể rắn đang giữ chặt tay gắp được trình bày qua 6 thông số như sau:
Để thông báo vị trí, người ta thường dùng một điểm làm điểm chuẩn được gọi là điểm hoạt động (trung tâm) của dụng cụ hay tâm điểm dụng cụ (TCP: Tool Center Point) nằm ở tâm của tay gắp. Để mô tả phương hướng của tay gắp, người ta lại sử dụng một hệ tọa độ khác được đặt qua TCP và như thế mô tả góc định hướng đến hệ tọa độ cơ bản. Do đó vị trí của một vật thể rắn đang giữ chặt tay gắp được trình bày qua 6 thông số như sau:
BK = (x [mml; ỵ [mm]; z [mml; a [°]; b [°]; c [°])
Bây giờ nếu vị trí này cần được một robot tay gập 6 trục tiếp nhận, sẽ xảy ra vấn đề tiếp theo. RBCN này chỉ có trục quay; nghĩa là 6 trị số cho khớp nối của nó lại là thông tin về góc. Điều này dẫn đến việc thông số tọa độ toàn cầu phải chuyển đổi sang góc khớp nối bằng cách gọi là chuyển đổi tọa độ (Hình 3). Thông tin về góc khớp nối được gọi là tọa độ khớp, tọa độ trục hay tọa độ robot (Hình 2).
Việc chuyển đổi tọa độ (Hình 1) đòi hỏi rất nhiều thời gian tính toán và cần công suất máy tính tương ứng. Khi hệ điều khiển lưu trữ vị trí không gian trong tọa độ toàn cầu, có thể dẫn đến tình trạng lập lờ không rõ ràng (tính đa nghĩa). Điều này có nguyên nhân từ phương trình chuyển đổi vì ở đây phải tính với những hàm lượng giác (thí dụ như sin) mà những hàm nghịch đảo của nó (hàm ngược, thí dụ như arcsin hay sin-1) có nhiều lời giải.
Những vị trí có tính đa nghĩa quan trọng nhất của nó là khuỷu tay lên/xuống và mặt trước/sau (Hình 2). Để giải quyết vấn đề này, người ta đưa thêm váo những thông số bổ sung để đảm bảo robot tiếp cận một cách rõ ràng vị trí trục mong muốn. Một tính đa nghĩa khác ở robot tay gập 6 trục là flip/no flip (lậưkhông lật), ở đây trục 4 và trục 5, trong mỗi trường hợp quay một góc bằng 180°, có thể đạt được cùng vị trí tuyệt đối với hai trị số khớp nối khác nhau.
Việc chuyển đổi tọa độ (Hình 1) đòi hỏi rất nhiều thời gian tính toán và cần công suất máy tính tương ứng. Khi hệ điều khiển lưu trữ vị trí không gian trong tọa độ toàn cầu, có thề dẫn đến tình trạng lập lờ không rõ ràng (tính đa nghĩa). Điều này có nguyên nhân từ phương trình chuyển đổi vì ở đây phải tính với những hàm lượng giác (thí dụ như sin) mà những hàm nghịch đảo của nó (hàm ngược, thí dụ như arscin hay sin-1) có nhiều lời giải.
Những vị trí có tính đa nghĩa quan trọng nhất của nó là khuỷu tay lên/xuống và mặt trước/sau (Hình 2). Để giải quyết vấn đề này, người ta đưa thêm vào những thông số bổ sung để đảm bảo robot tiếp cận một cách rõ ràng vị trí trục mong muốn. Một tính đa nghĩa khác ở robot tay gập 6 trục là flip/no flip (lật/không lật), ở đây trục 4 và trục 5, trong mỗi trường hợp quay một góc bằng 180°, có thể đạt được cùng vị trí tuyệt đối với hai trị số khớp nối khác nhau.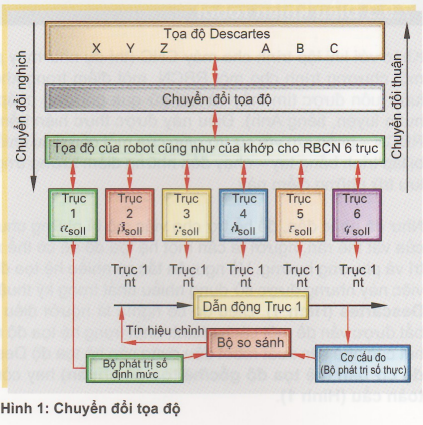
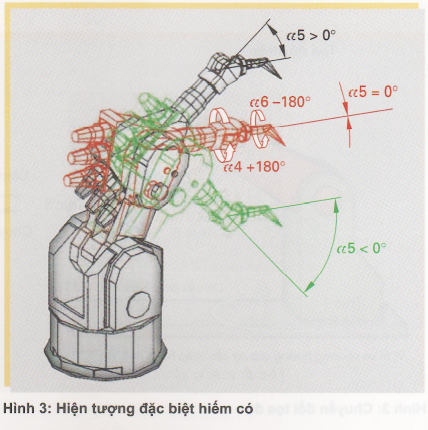
 Hiện tượng đặc biệt hiếm có như tình huống Alpha 5/0° đặt hệ điều khiển trước những vấn đề tiếp theo. Trong Hình 3, một robot tay gập 6 trục phải dịch chuyển trên một quỹ đạo, trong đó góc khớp α5 của trục 5 biến đổi trị số từ α5 > 0 đến α5 < 0 và ngược lại. Tại vị trí này, trục 4 và 6 có thể chiếm giữ vô số vị trí kết hợp mà không cần thay đổi vị trí và phương hướng của cơ cấu chấp hành cuối vì chúng nằm trên một đường trục được chỉnh thẳng hàng, ở đây có những chương trình con để dẫn tới việc tìm ra lời giải rõ ràng.
Hiện tượng đặc biệt hiếm có như tình huống Alpha 5/0° đặt hệ điều khiển trước những vấn đề tiếp theo. Trong Hình 3, một robot tay gập 6 trục phải dịch chuyển trên một quỹ đạo, trong đó góc khớp α5 của trục 5 biến đổi trị số từ α5 > 0 đến α5 < 0 và ngược lại. Tại vị trí này, trục 4 và 6 có thể chiếm giữ vô số vị trí kết hợp mà không cần thay đổi vị trí và phương hướng của cơ cấu chấp hành cuối vì chúng nằm trên một đường trục được chỉnh thẳng hàng, ở đây có những chương trình con để dẫn tới việc tìm ra lời giải rõ ràng.
Nói tóm lại, trong chuyển đổi thuận, tọa độ toàn cầu cũng như tọa độ chuẩn (gốc) cần tìm luôn luôn có thể xác định được một cách rõ ràng từ tọa độ khớp cũng như tọa độ trục đã cho, độc lập với dạng thiết kế của RBCN (số lượng trục, loại trục, cách sắp xếp trục).
 ở chuyển đổi nghịch thì hệ thống sẽ phản ứng khác, vấn đề ở đây chỉ đặc biệt giải quyết được cho RBCN hiện tại. Sẽ xảy ra tính đa nghĩa (đa trị, trạng thái không rõ ràng), khi tính toán cho ra kết quả là một số lượng giới hạn của các lơi giải có giá trị như nhau. Se hình thành hiện tượng hiếm có khi tính toán cho ra vô số lời giải. Người lập trình phải lưu ý đến cấu hình đúng (phù hợp) khi thiết lập chương trình robot.
ở chuyển đổi nghịch thì hệ thống sẽ phản ứng khác, vấn đề ở đây chỉ đặc biệt giải quyết được cho RBCN hiện tại. Sẽ xảy ra tính đa nghĩa (đa trị, trạng thái không rõ ràng), khi tính toán cho ra kết quả là một số lượng giới hạn của các lơi giải có giá trị như nhau. Se hình thành hiện tượng hiếm có khi tính toán cho ra vô số lời giải. Người lập trình phải lưu ý đến cấu hình đúng (phù hợp) khi thiết lập chương trình robot.
Một hệ tọa độ khác được đưa vào sử dụng trong phương pháp teach (chỉ dấn thao tác) là hệ tọa độ tay gắp. Khi đường thẳng trong không gian phải được điều khiển nằm song song hay thẳng góc với hướng của dụng cụ cũng như của tay gắp, thí dụ đưa một chi tiết vào trong một lỗ khoan nằm nghiêng trong không gian (có nghĩa là trục tâm của lô khoan không ăn khớp với trục X, Y hay z của tọa độ toàn câu), như vậy hâu như không thể giải quyết vấn đề này trong hệ tọa độ toàn cầu hay hệ tọa độ khớp. Chính ở đay trong phương pháp teach, nhiều trục phải chuyển động cùng một lúc (Hình 1).
Trong trường hợp này một hệ tọa độ được đặt vào tay gắp (X’, Y’ và Z’ trong Hình 1). Phần lớn người ta sử dụng hệ tọa độ không gian Descartes, trong đó tọa độ gốc trùng vợi điểm hoạt động của dụng cụ (TCP) và 3 trục tọa độ thẳng góc được bố trí sao cho một trục năm chính xác vào hướng tay gắp nối dài. Chuyển động vận hành ở phương pháp teach được thực hiện theo hướng của những trục tọa độ này.
Ngược lại với các máy CNC, thí dụ như máy phạy CNC, phần lớn cần hệ điêu khiển 3D là đủ, ở RBCN thông thường xuất hiện nhiều hơn 3 trục. Điều này đưa đến kết quả là những thông tin tọa độ cho robot thường khó hiểu hơn. về nguyên tắc, có thể nói rằng việc sử dụng các hệ tọa độ khác nhau như
■ Tọa độ toàn cầu
■ Tọa độ khớp
■ Tọa độ tay gắp
chỉ quan trọng đối với vị trí hoạt động trong phương pháp teach. Dù sao hệ điều khiển cũng luôn luôn cho trị số của trục (góc ở trục quay và đoạn thẳng ở trục tịnh tiến) đến bộ điều chỉnh vị trí. Mỗi một hệ tọa độ đêu có ưu điểm của nó khi ứng dụng trong thực tiễn.
 Bộ nội suy quỹ đạo riêng cho robot
Bộ nội suy quỹ đạo riêng cho robot
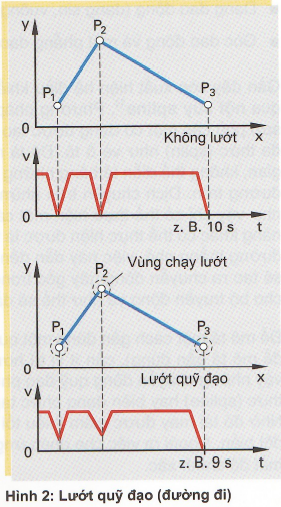
Bên cạnh bộ nội suy “cổ điển” cho đường thẳng và đường tròn, còn có bộ nội suy đặc biệt trong hệ điều khiển robot, thí dụ như trong cách định vị phỏng chừng (lướt nhẹ nhàng qua điểm định vị), ở việc chạy qua những điểm nối tiếp trong không gian theo cách bình thường, mỗi một điểm cho trước đều được chạy qua tọa độ và định hướng một cách chính xác. Đối với việc điều chỉnh vị trí, điều này có nghĩa là vận tốc quỹ đạo ở các điểm luôn luôn bằng không (0) (Hình 2). Thường thì việc này liên quan đến những điểm trung gian (điểm chuyển tiếp) nơi mà không cần đạt đến một cách chính xác; những điểm này được dùng thí dụ như chỉ đê chạy tránh một chướng ngại vạt. Người ta tất nhiên sẵn sàng chấp nhận từ bỏ độ chính xác để đạt vận tôc nhanh.
Định vị phỏng chừng quỹ đạo (đường đi) cho phép chuyển tiếp liên tục từ một phần quỹ đạo này đi qua phân khác dựa trên vận tốc và định hướng. Nhờ thế mà chuyến động sẽ hài hòa hơn. Thêm vào đó còn tiết kiệm được gần 10-15% thời gian (Hình 2). Qua cách định vị phỏng chừng (lướt) của chuyển động robot, hệ điều khiển không cần phải hãm vận tốc xuống đến khi dừng máy (v = 0 m/s) mà còn cộ thể thay đổi hướng đi đến điểm tới một cách hài hòa nếu đạt đến bán kính phỏng chừng. Tùy theo nhà sản xuất, bán kính phỏng chừng được định trước qua phần mềm hay có thể lập trình tự do (trong giới hạn kỹ thuật cho phép).
Một trường hợp lướt khác được ứng dụng thí dụ như khi cần phải thực hiện một môi hàn theo một thiết kế, mối hàn này không chỉ nằm trên một đường thẳng mà còn có nhiều điểm gãy. Cách lướt dường như không thể thực hiện được. Một mặt vì những điểm phụ (điểm trung gian) không được tiếp cận chính xác tùy theo việc chỉnh bán kính phỏng chừng, mặt khác vận tốc quỹ đạo của TCP ở gần điểm phụ sẽ thay đổi, điều này lại tương ứng với việc thay đổi vận tốc dẫn tiến của hàn.
ở việc chạy lướt với vận tốc (Hình 1), trong trường hợp lý tưởng, robot sẽ chạy với vận tốc không giảm trên quỹ đạo của TCP trong điểm chạy lướt qua điểm được lập trình. Tuy nhiên điều này không phải lúc nào cũng thực hiện được nên vận tốc ở điểm chạy lướt giả định có trị số giữa 0 (định vị chính xác, có nghĩa là không có chạy lướt) và yS0|| (chạy lướt một cách lý tưởng, không thay đổi vận tốc), về cơ bản, kết cấu hàn cần phải được thiết kế sao cho việc hàn tự động không gặp vấn đề lớn.
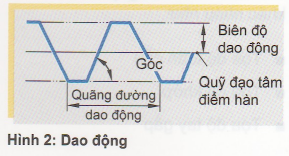
Một loại nội suy rất đặc biệt là dao động (chuyển động lắc qua lại). Nó có lĩnh vực ứng dụng chính trọng hàn theo quỹ đạo. Trong phương pháp này, dụng cụ hàn (đũa hàn) lắc qua lại quanh tâm điểm của quỹ đạo là điều cần thiết. Bộ nội suy đặc biệt làm đơn giản hóa việc thực hiện một chuyển động lắc như thế trong hàn qua các thông tin sau (Hình 2):
■ Hành trình dao động và tần số dao động,
■ Dạng dao động (dạng sin, vuông góc, tam giác),
■ Góc dao động và mặt phẳng dao động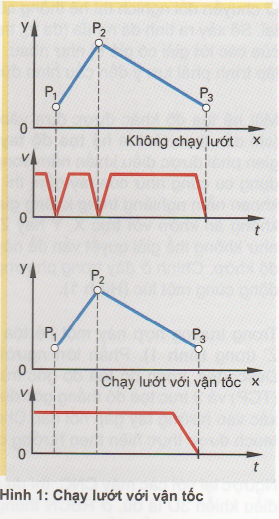
Gần đây còn xuất hiện hệ điều khiển robot với việc điều khiển quỹ đạo qua nội suy spline1. Phương pháp này có ứng dụng, thí dụ như trong sơn phủ các mặt có dạng được tạo bởi những đường cong bất kỳ dạng đa thức (splin) như vẽ ô tô. Đó là những mặt phẳng cong trong không gian, không thể diễn tả bằng những hàm toán học như đương thang hay đường tròn. Dịch chuyển trên những đường cong không gian phức tạp như vậy chỉ có thể thực hiện một cách “phỏng chừng” mà thôi. Một khả năng khác có thể thực hiện được là ta có thể mô tả quỹ đạo với rất nhiều đường thẳng nhỏ, việc này dẫn đến kết quả là tốn nhiều công sức cho phương pháp teach. Mặt khác qua đây sẽ tạo ra chuyển động gãy góc trong khi vẫn tìm cách giữ vận tốc cố định trên quỹ đạo khiến gia tốc nhảy vọt cho bộ truyền động và như thế sẽ dẫn đến tải quá lớn cho các bộ phận chịu mài mòn.
Để mô tả một cách gần đúng một quỹ đạo cong như thế với sự hỗ trợ của đường spline (hàm toán học đặc biệt đê mô tả gân đúng), cân ít vị trí hơn so với nội suy đường tròn và nội suy tuyến tính theo truyền thống. Nhờ vậy những chuyển động quỹ đạo phức tạp (thí dụ như bề mặt được tạo bởi những đường cong bất kỳ dạng đa thức (spline) hay biên dạng phức tạp) có thể lập trình được với chi phí thấp đáng kể qua phương pháp teach. Nhờ đó tải máy được giảm thiếu tối đa qua những đoạn chuyển tiếp hài hòa cho quỹ đạo thay vì gia tốc nhảy đột biên. Ngoài ra việc cho phép ứng dụng nội suy của đường spline tạo ra vận tốc quỹ đạo cao hơn mà không mất độ chính xác.
 Bài tập:
Bài tập:
1. Tính đa nghĩa nào có thể hình thành ở một robot tay gập 6 trục qua việc đưa vào thêm một trục thứ 7 (trục dịch chuyển)?
2. Hãy nhập cho RBCN ở bài tập số 1 ở trên một lần là tọa độ khớp và một lần là tọa độ toàn cầu. Hãy cho biết đơn vị vật lý chính xác.
3. Hãy phác thảo vị trí có tính đa nghĩa flip/no flip ở một robot tay gập 6 trục.
4. Hãy phác họa lược tả (profile) vận tốc của trục X và y của một hệ điều khiển quỹ đạo 2 chiều (2D) trong một đô thị v-t cho chuyển động của một vòng tròn đầy.
9.4 Lập trình của RBCN
\Tương tự như lập trình của máy công cụ, ở đây nhiệm vụ dịch chuyển cũng như xử lý thao tác phải được phân tách thành từng bước tuần tự và thiết lập thành chương trình cho hệ điều khiển robot hiện thời qua các phương pháp lập trình phù hợp. Việc lập trình của robot có ảnh hưởng chủ yếu đến năng suất của một RBCN. Để giảm thiểu tối đa thời gian lắp đặt cũng như thời gian lắp đặt lại, việc lập trình phải đơn giản, tạo được cái nhìn tổng quát và có thể thực hiện được mà ít tốn kém.
Thí dụ :Một chi tiết cần vận chuyển từ vị trí lưu trữ đến một giá kê (bàn để phôi) và được đặt ở đó.
Chương trình robot cần phải:
■ dễ thiết lập (dễ viết)
■ thích nghi một cách đơn giản
■ có thể tối ưu hóa dễ dàng
■ có thể sửa nhanh và đơn giản
Trong lập trình cho robot, về cơ bản người ta phân biệt hai giai đoạn. Thứ nhất là xác định các điểm (bao gồm cả phương hướng) ở ứng dụng và lưu trữ chúng. Thứ hai là ấn định trong chương trình thực sự quãng đường dịch chuyển, gia tốc và vận tốc giữa các điểm (đường thẳng, đường tròn), lập chương trình con tùy hoàn cảnh cho phép và xây dựng giao tiếp (giao diện) với đơn vị xuất và nhập dữ liệu. Xét về khía cạnh kỹ thuật thông tin, những thông tin về điểm trong chương trình chính là những biến phải được điền vào với các trị số (Hình 1).
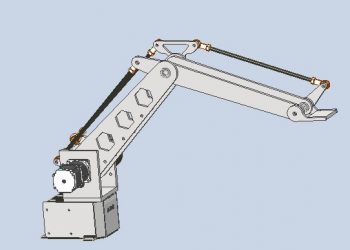
Việc tìm các điểm thường xảy ra trong thực tiễn qua thu thập tọa độ bằng cách dẫn robot thực hiện chuyền động khi gia công (teach) trực tiếp ở nơi sử dụng. Mặt khác các nhà sản xuất robot ngày nay đề nghị có thể cung cấp những phần mềm mô phỏng (Hình 2) mà qua sự hỗ trợ của chúng robot có thể được ánh xạ toàn bộ. ở đây các điểm đã có sẵn qua mô phỏng. Việc mô phỏng có điểm lợi là nhà sản xuất có thể thực hiện những xem xét quan trọng ở sản phẩm trước khi đưa vào vận hành như quan sát va chạm, tìm ra thời gian chu trình (chu kỳ xung nhịp), mô phỏng việc dừng máy (sự cố, hỏng hóc). Tuy nhiên trong thực tiễn RBCN phải được huấn luyện lại khi lắp đặt thật sự.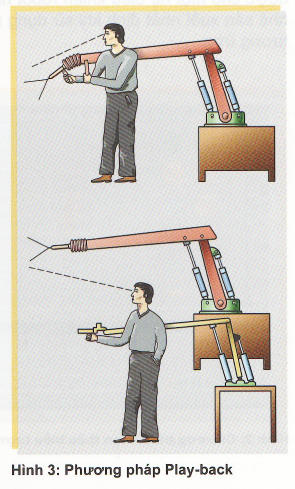 Một biến thể mà qua đó không những các điểm mà cả các hành trình dịch chuyển với gia tốc và vận tốc được tìm ra trong một bước gia công, đó là phương pháp play-back (lập trình qua cách lặp lại quá trình gia công đã được thực hiện bằng tay trước đó, lập trình nhại lại, lập trình bắt chước thao tác, lập trình theo mẫu).
Một biến thể mà qua đó không những các điểm mà cả các hành trình dịch chuyển với gia tốc và vận tốc được tìm ra trong một bước gia công, đó là phương pháp play-back (lập trình qua cách lặp lại quá trình gia công đã được thực hiện bằng tay trước đó, lập trình nhại lại, lập trình bắt chước thao tác, lập trình theo mẫu).
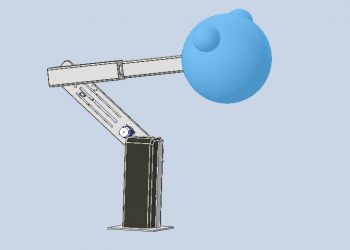
ở đây RBCN được người điều khiển dẫn dọc theo quỹ đạo cần lập trình trong tình trạng truyền động được ngắt đi. Trong giai đoạn này tất cả các dữ liệu cần thiết cho việc tái hiện quỹ đạo được lưu trữ trong một tín hiệu gốc thời gian (nhịp thời gian). Loại lập trình này có ứng dụng chính trong các robot phủ lớp (tạo màng, tráng men, phun sơn) (Hình 3).
về cơ bản, việc lập trình thực sự của robot có thể thực hiện dựa vào hai cách sau đây:
■ Lập trình Online (Lập trình trực tuyến)
■ Lập trình oííline (Lập trình ngoại tuyến, gián tiếp)
Người ta nói về lập trình trực tuyến khi việc lập chương trình Online, được thực hiện trực tiếp trong phương pháp teach.
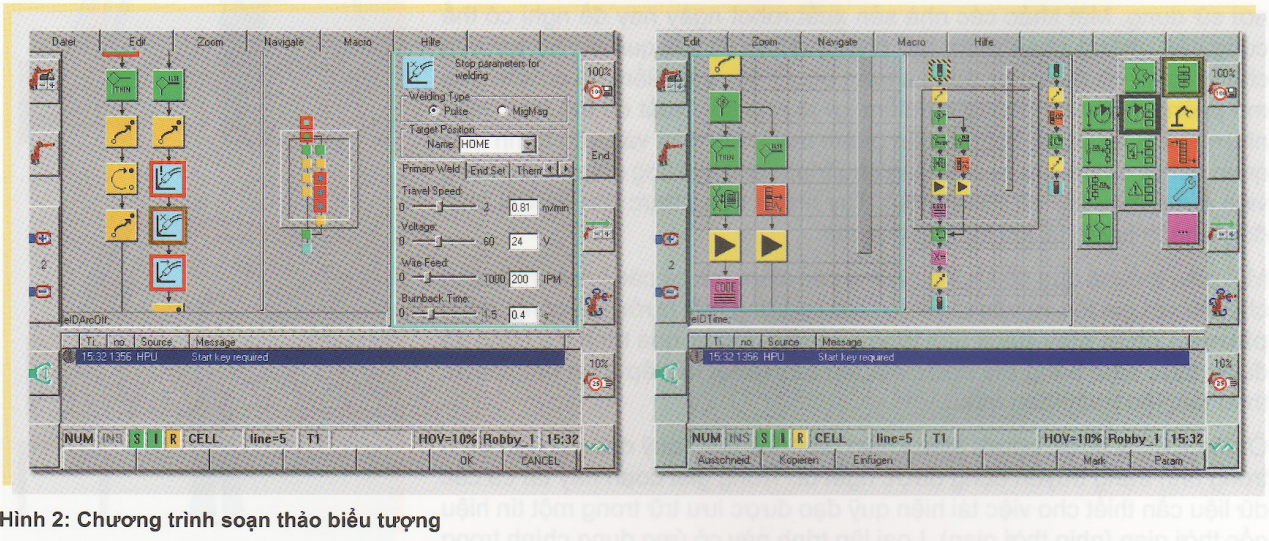
ở đây có một vài nhà sản xuất phần mềm chào hàng cung cấp khả năng tương tác bằng đồ họa, được phát triển đến mức người điều khiển không cần phải biết cú pháp đặc biệt về các lệnh của nhà sản xuất cho những cáu trúc chương trình đơn giản. Chương trình (Hình 1) được diễn tả qua lưu đồ được tạo thành từ những biểu tượng đã được định nghĩa (Hình 2) bằng những đặc tính nhất định (thí dụ lệnh dịch chuyển, kết nối cổng vào/cổng ra). Dĩ nhiên là chương trình có khả năng chuyển đổi giữa các phương thức đồ họa và văn bản.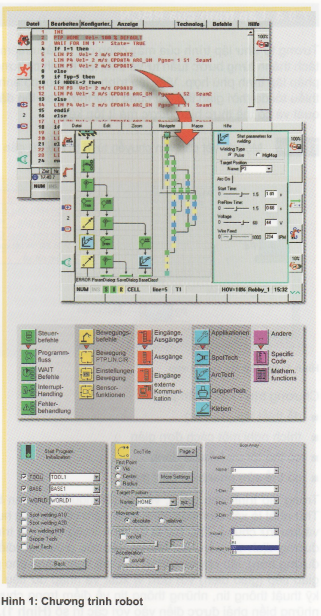 Việc lập trình trực tuyến có điểm yếu là thiết bị không thể sản xuất trong thời gian lập trình. Vì lý do đó mà người ta có hệ lập trình ngoại tuyến (online) có khá năng lập chương trình trong thời gian chuẩn bị gia công. Những hệ thống này thường mô tả toàn bộ các ứng dụng trong PC. Như ở lập trình với CNC, dữ liệu CAD có thể nhập vào. Qua đó người ta không những có thề ấn định các điểm mà còn có thể thực hiện việc tối ưu hóa chương trình. Những tình huống nhất định, thí dụ như một phần của ứng dụng ngừng hoạt động, sẽ được mô phỏng và chuẩn bị các biện pháp tương ứng (thiết kế dư thừa những lĩnh vực nhất định). Những hệ lập trình độc lập (không lệ thuộc vào nhà sản xuất hay máy móc nhất định) lập ra các mã chương trình chỉ trở thành mã nguồn có thể sử dụng được cho một hệ điều khiển robot nhất định của một nhà sản xuất nhất định khi sử dụng một bộ hậu xử lý tương ứng.
Việc lập trình trực tuyến có điểm yếu là thiết bị không thể sản xuất trong thời gian lập trình. Vì lý do đó mà người ta có hệ lập trình ngoại tuyến (online) có khá năng lập chương trình trong thời gian chuẩn bị gia công. Những hệ thống này thường mô tả toàn bộ các ứng dụng trong PC. Như ở lập trình với CNC, dữ liệu CAD có thể nhập vào. Qua đó người ta không những có thề ấn định các điểm mà còn có thể thực hiện việc tối ưu hóa chương trình. Những tình huống nhất định, thí dụ như một phần của ứng dụng ngừng hoạt động, sẽ được mô phỏng và chuẩn bị các biện pháp tương ứng (thiết kế dư thừa những lĩnh vực nhất định). Những hệ lập trình độc lập (không lệ thuộc vào nhà sản xuất hay máy móc nhất định) lập ra các mã chương trình chỉ trở thành mã nguồn có thể sử dụng được cho một hệ điều khiển robot nhất định của một nhà sản xuất nhất định khi sử dụng một bộ hậu xử lý tương ứng.


















{kind=link}