
Để mô tả những điểm trong không gian trên các chuyển động của trục, người ta cẩn các hệ trục tọa độ khác nhau (viết tắt là KoSyst):
WORLD: Hệ trục tọa độ WORLD là một hệ trục tọa độ vuông góc cổ định được quy định.
Nó là hệ trục toa độ gốc cho các hệ trục tọa độ ROBROOT và BASE.Trong việc chỉnh về gốc (chỉnh vể vị trí cơ bản) thì hệ trục tọa độ-gốc nằm trong chân robot và trùng hợp với ROBROOT (Hình 2).
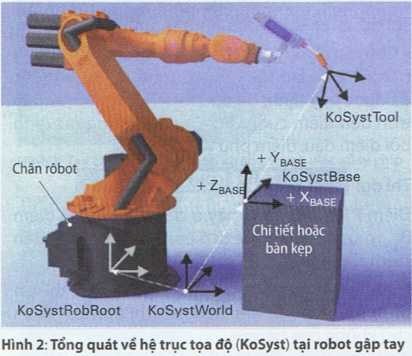
ROBROOT: với ROBROOT có thể định nghĩa được một dịch chuyển của robot đến hệ trục tọa độ gốc (WORLD).
BASE: Hệ trục tọa độ BASE là hệ trục tọa độ vuông góc, mô tả vị trí của chi tiết. Nó dựa vào hệ trục tọa độ WORLD và được đo bởi người sử dụng. TOOL: Hệ trục tọa độ TOOL là hệ trục tọa độ vuông góc, nằm tại điểm hoạt động TCP (Tool Center Point) của dụng cụ. Nó dựa vào hệ trục tọa độ BASE.
Trong việc thiết lập cơ bản thì gốc của hệ trục tọa độ TOOL nằm ở tâm điểm mặt bích. Hệ trục tọa độTOOLđược người sửdụng đẩy vào trong điểm hoạt động của dụng cụ (Hình 3).
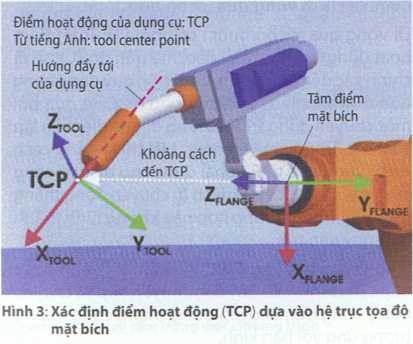
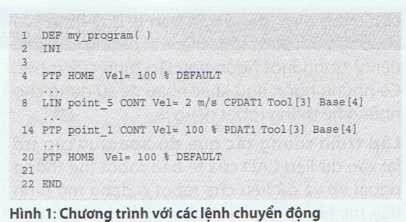
Một ưu điểm của việc dịch chuyển TCP (điểm hoạt động) từ tâm điểm của mặt bích đến TCP của dụng cụ là chuyển động thẳng trong hướng đẩy của dụng cụ (XT00L) khi điểm hoạt động (TCP) đứng nghiêng trong không gian.Khi dụng cụ và có thể là chi tiết đã được đo chính xác, chuyển động có thể được bắt đẩu lập trình. Ngôn ngữ lập trình là tiếng Anh (Hình 1).



















{kind=link}