
Các quá trình trong kỹ thuật được tự động hóa với các hệ thống thiết bị điểu chỉnh. Chức năng của các hệ thống thiết bị điểu chỉnh là đạt đến hoặc duy trì các giá trị định trước, thí dụ như vòng quay, vị trí, vận tốc, nhiệt độ. v.v…

Điều chỉnh giá trị cố định. Được gọi là điểu chỉnh giá trị cố định khi giá trị cho trước phải được duy trì, không thay đổi trong suốt quá trình điều khiển, thí dụ như vận tốc của máy tiện.
Điều chỉnh nối tiếp. Khi dụng cụ được điều khiển liên tục theo trị số đã được tính toán trước, thí dụ như đường kính khi tiện theo biên dạng, điều này được gọi là điều chỉnh nối tiếp.
Thí dụ: Điều chỉnh vòng quay trên máy tiện CNC (Hình 1)
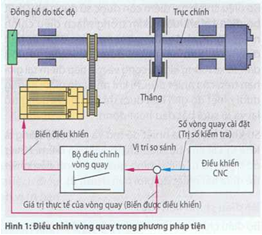
Số vòng quay thực của trục chính (Trị số điều chỉnh), thí dụ được đo bằng đồng hồ đo vòng quay kỹ thuật sốvà được so sánh liên tục tại vị trí so sánh với giá trị định mức của vòng quay (Trị số kiểm tra, trị số định trước hay biến chuẩn). Khi có sai lệch, thí dụ vì lực cất dao động (đại lượng gây nhiễu, biến gây nhiễu, trị số rối) bộ điểu chỉnh sẽ chỉnh lại số vòng quay cho bằng với giá trị định mức. Quy trình điều chỉnh được thực hiện bằng cách so sánh liên tục giữa giá trị định mức và giá trị thực của biến điều khiển luôn luôn là vòng khép kín, do đó được gọi là vòng điểu chỉnh (Hình 2).
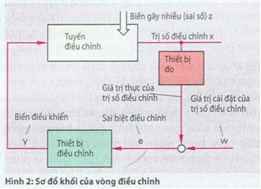
Mỗi quỵ trình điều chỉnh đều được định rõ đặc điểm qua ba quá trình:
- Đo biến (được) điều khiển
- So sánh với các trị số định trước
- Cân bằng qua việc điểu chỉnh lại
Bộ điều chỉnh và thiết bị hiệu chỉnh lại tạo thành hệ thống điều chỉnh. Các đơn vị chịu ảnh hưởng của hệ thống điều chỉnh được gọi là tuyến điều chinh (đối tượng điều chinh, hệ được điều khiển vòng kín).
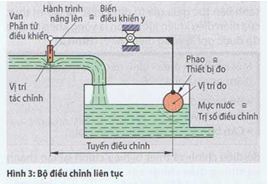
Thí dụ về điều chỉnh vị trí (Hình 3)
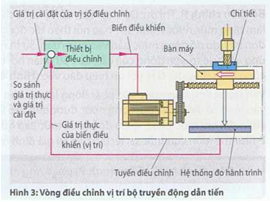
Mỗi máy CNC, ngoài việc điều chỉnh vòng quay còn có một điểu chỉnh vị trí để có thể điều chỉnh được dụng cụ hoặc bàn máy theo giá trị định mức đã được lập trình trước (Trang 524).Tuyến điểu chỉnh của vòng điều chỉnh vị trí (Hình 3) bao gồm động cơ truyền động bằng ren cẩu, bàn máy, và thiết bị đo. Vị trí của bàn máy được đo liên tục và so sánh với giá trị định mức của chương trình. Khi giá trị thực bị sai lệch so với giá trị yêu cẩu, bàn máy sẽ chuyển động cho đến khi giá trị thực đạt đến giá trị định mức
.Các loại điều chỉnh
Tùy theo cách vận hành người ta phân biệt điểu chỉnh liên tục và không liên tục.
Bộ điều chỉnh không liên tục (gián đoạn)
Bộ điểu chỉnh không liên tục có hai hoặc nhiều vị trí đóng mở. Bộ điều chỉnh thay đổi biến điều khiển không liên tục bằng cách đóng mở theo bậc. Nếu bộ điểu chỉnh chỉ có hai vị trí ĐÓNG và MỞ, còn được gọi là bộ điểu chỉnh hai điểm.
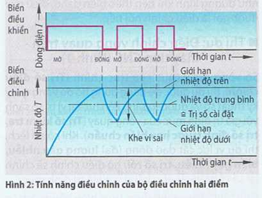
Bộ điều chỉnh hai điểm còn được sử dụng như một bộ điều chỉnh lưỡng kim trong mạch điều chỉnh nhiệt độ (Hình 1).
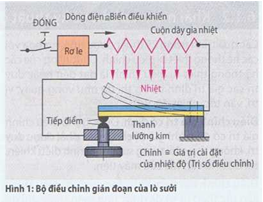
Khi mở lò sưởi, lúc đẩu các tiếp điểm của lò xo lưỡng kim đóng. Khi lò sưởi nóng dần, lò xo lưỡng kim bị cong và mởtiếp điểm tại giới hạn trên của nhiệt độ. Chỉ khi nhiệt độ giảm xuống dưới nhiệt độ giới hạn dưới thì tiếp điểm đóng trở lại và lò sưởi bắt đẩu hoạt động.
Sự khác biệt giữa nhiệt độ mở và nhiệt độ đóng là khe vi sai của bộ điều khiển hai tiếp điểm. Nhiệt độ trong lò tự điều chỉnh qua quá trình dẫn nhiệt trễ giữa hai nhiệt độ giới hạn (Hình 2).
Bộ điều chinh liên tục
Bộ điều chỉnh liên tục tập hợp biến điểu chỉnh X và thay đổi biến điều khiểny liên tục trong phạm vi điểu chỉnh (Hình 3).
Hệ thống có thể duy trì biến điểu chỉnh, thí dụ như mực nước trong bình chứa, một cách chính xác hơn bộ điều chỉnh không liên tục.
Để khảo sát đặc tính của bộ điều chỉnh liên tục, người ta thay đổi tín hiệu đẩu vào X một cách gián đoạn và quan sát sự phản ứng tín hiệu đẩu ra y (Hình 4).

Cách mà tín hiệu đẩu ra thay đổi trong suốt thời gian quan sát được gọi là hàm chuyển tiếp hoặc bước phản hồi nhảy bật của bộ điều chỉnh, ở các bộ điểu chỉnh liên tục, người ta phân biệt bộ điều chỉnh p, bộ điểu chỉnh I, bộ điều chỉnh Pl, bộ điều chỉnh D và bộ điểu chỉnh PID.
Bộ điều chỉnh p. Thí dụ: Do trục trặc, dòng nước chảy vào trong ống làm tăng mức nước (Hình 3). Phao nổi theo tác động lên van qua một đòn bẩy, do đó dòng nước dẫn vào giảm dần. Sự thay đổi xảy ra tương ứng với tỷ lệ truyền động của cần van. Sự phản hổi của bộ điều chỉnh cũng là sự thay đổi tỉ lệ với tín hiệu đẩu vào (Hình 4).
Van trong ống dẫn nước vào phải đóng lại sao cho lượng nước chảy vào bình cố định, cho dù lượng nước được dẫn vào tăng lên. Điều này cũng đòi hỏi mức phao và do đó bộ chỉ mức cao hơn. Bộ điều chỉnh p như thế luôn còn một sai lệch so với trị giá định mức.

Bộ điểu chỉnh I: Trong bộ điều chỉnh tích phân (điều chỉnh I) một sự thay đổi đột ngột trị số điểu chỉnh tạo ra một thay đổi vận tốc của biến điểu khiển (trị số tác chỉnh (Hình 1).
Sự sai lệch điểu chinh (e2< e1) càng lớn tại đẩu vào của bộ điều chỉnh khiến phẩn tử điều khiển (cơ cấu tác động) thay đổi càng nhanh (Đường biểu diễn 1 và 2).
Mực nước của bổn được bộ điểu chỉnh I duy trì không thay đổi (Hình 2).
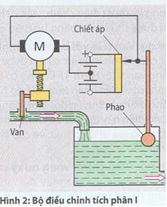
Khi mực nước đạt đến giá trị yêu cẩu, điện áp tại thiết bị đo điện áp bằng không. Động cơ đứng yên. Khi phao hạ xuống, động cơ nhận được điện áp. Phao càng hạ thấp, động cơ quay cành nhanh, do đó van mở nhanh hơn. Vận tốc chỉnh của van tỷ lệ thuận trực tiếp với sự sai lệch điểu chỉnh của phao. Chiểu điện áp thay đổi khi phao dâng lên trở lại. Qua đó chiểu quay của động cơ thay đổi. Van đóng. Trị số thực đạt giá trị yêu cắu, hắu như không có chênh lệch đáng kể.
Bộ điểu chỉnh I chậm hơn bộ điều chỉnh p, nhưng loại trừđược hoàn toàn sự sai lệch điều chỉnh.
Bộ điều chinh PI.Trong bộ điểu chỉnh Pl, bộ điều chỉnh p (tỷ lệ) và bộ điều chỉnh l (tích phân) lắp song song. Qua đó bộ điều chịnh Pl kết hợp được ưu điểm của bộ điều chỉnh p (điểu chỉnh nhanh) với Ưu điểm của bộ điều khiển I (không cho phép còn sai lệch điểu chỉnh). Thí dụ bộ điều chinh Pl được dùng để điều chỉnh vị trí bàn máy trong máy CNC.
Bộ điều chinh D. ở bộ điều chỉnh tác động vi phân (Bộ điều chỉnh D), với một sự sai lệch e rất nhanh, trị số chỉnh y thay đổi trong thời gian ngắn và sau đó trở lại trị số ban đẩu (Hình 3).
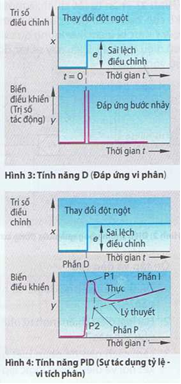
Sự sai lệch càng nhanh, sự thay đổi của trị số điểu chỉnh càng lớn. Do bộ điều chinh D chỉ thay đổi trị số trong thời gian ngắn, không thể bù cho sự sai lệch cố định. Nó chỉ có thể sử dụng chung với bộ điều chỉnh P, I hoặc PI.
Thành phần đạo hàm (phẩn D, phần vi phân) trong bộ điều khiển làm tăng tốc trị số điểu chỉnh và gây ra tác động rất nhanh.
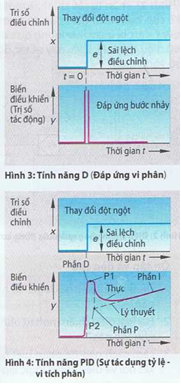
Bộ điểu chỉnh PID. Bộ điểu chỉnh PID tác động còn nhanh hơn bộ điều chỉnh PI. Sau khi thay đổi tín hiệu vào một cách đột ngột (Hình 4), phẩn ảnh hưởng D thay đổi trong thời gian ngắn trị số tác chỉnh (P1). Vì bây giờ phần p của bộ điều chỉnh tác động rất nhanh đến trị số tác chỉnh tương ứng với sựsai lệch điểu chỉnh, và sẽ không trở lại trị số ban đẩu (P2). Giá trị mới của trị số tác chỉnh được cộng vào phẩn I của bộ điểu chỉnh, do đó sự sai lệch điểu chỉnh trở lại bằng không.
Với bộ điều chinh PID, người ta có thể điểu chỉnh chẳng hạn như số vòng quay của động cơ điện một chiều, qua đó số vòng quay của động cơ cũng không thay đổi ngay cả khi tải khác nhau.
Bộ điểu chỉnh PID kết hợp ưu điểm của các bộ điều chỉnh P, I và D, đáp ứng nhanh và loại trừ hoàn toàn sự sai lệch điểu chỉnh.
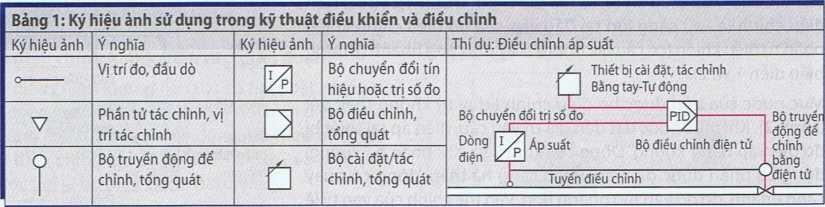
Các ký hiệu ảnh theo tiêu chuẩn được sử dụng để biểu thị các phẩn quan trọng của mạch điều chỉnh (Bảng 1).
Bộ điều chỉnh điện
Trong kỹ thuật điều chỉnh, việc xử lý tín hiệu hẩu như chỉ được thực hiện bằng bộ điều chỉnh điện.
Thí dụ: Van tỉ lệ với bộ điều chỉnh PID. Thí dụ, vận
tốc của xi lanh thủy lực có thể được điều chỉnh vô cấp bằng van tỉ lệ (Hình 1).
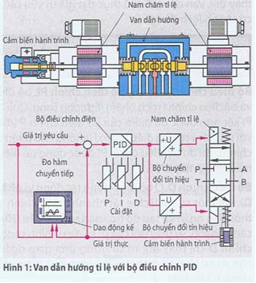
Chúng có bộ ghi nhận hành trình (cảm biến hành trình) để đo hành trình của van bằng điện và chuyển đổi sang dòng điện điều khiển. Dòng điện này được điểu chỉnh lại qua bộ điểu chỉnh PID theo giá trị định mức và cấp cho nam châm tỉ lệ (Trang 502).
Thí dụ: Điều chỉnh vòng quay của động cơ thủy lực. Trục đùn ép của máy đúc áp lực được truyền động từ động cơ thủy lực. Để duy trì tốc độ vòng quay không đổi, người ta sử dụng bộ điểu chỉnh Pl (Hình 2). Phần tử tác chỉnh là một van tỉ lệ. Vận tốc kế cho biết trị số thực của vòng quay. Khi số vòng quay thực bị giảm, lưu lượng qua van sẽ thay đổi do bộ điều chỉnh Pl. Điều này sẽ tác động làm thay đổi số vòng quay.
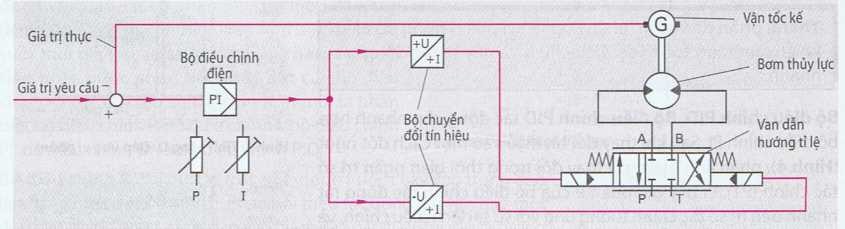
Hình 2: Điều chỉnh vòng quay của động có thủy lực


















{kind=link}