
Thao tác bằng tay là một phần quan trọng của tự động hóa và là một phần chức năng của dòng vật liệu (Hình 1).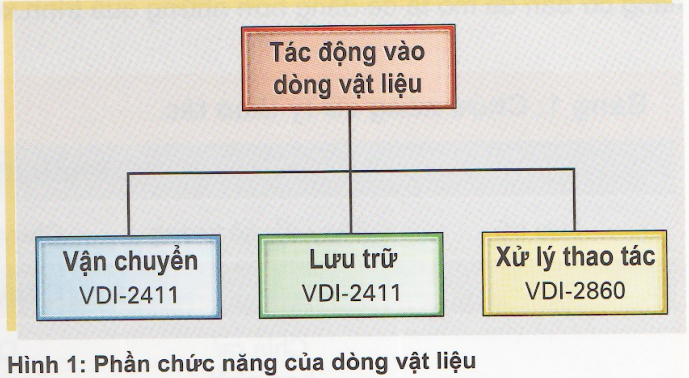 Theo quy định VDI 2860 của Hiệp Hội Kỹ Sư Đức (VDI), thao tác bằng tay được hiểu là việc tạo ra, thay đổi có chủ đích hoặc việc duy trì tạm thời một sự sắp xếp thứ tự đã định trước trong không gian của vật thể có kích thước hình học được xác định.
Theo quy định VDI 2860 của Hiệp Hội Kỹ Sư Đức (VDI), thao tác bằng tay được hiểu là việc tạo ra, thay đổi có chủ đích hoặc việc duy trì tạm thời một sự sắp xếp thứ tự đã định trước trong không gian của vật thể có kích thước hình học được xác định.
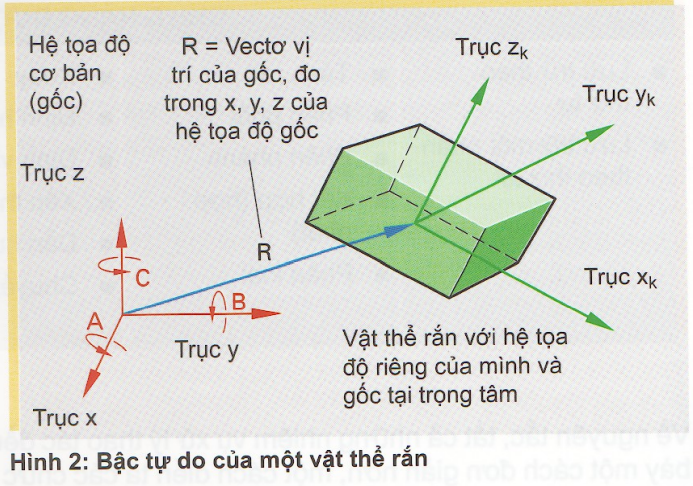
VỊ trí một vật thể rắn được xác định trong không gian bởi sáu bậc tự do của nổ (Hình 2). Đó là ba bậc tự do tịnh tiến – nghĩa là theo đường thẳng – (thí dụ như tọa độ X, y và z của trọng tâm vật thể) và ba bậc tự do quay (thí dụ như góc quay xung quanh các trục X, y và z). Thông số về tọa độ tịnh tiến còn được gọi là vị trí củavật thể, trong khi thông số về tọa độ quay được gọi là phương hướng. Tổng hợp tất cả sáu thông tin về tọa độ, người ta gọi là vị trí của vật thể trong không gian.
Một đại lượng đặc trưng để mô tả những nhiệm vụ xử ly thao tác là bậc trật tự oz (trạng thái trật tự/trạng thái thứ tự) của vật thể rắn. Nó cho biết vật thể được xác định bằng bao nhiêu bậc tự do từ tôi đa sáu bậc tự do mà vật thể có được (ba tịnh tiến và ba quay) (Hình 3). Bậc trật tự oz được hợp thành từ tỷ lệ của bậc định hướng OG và bậc vị trí PG.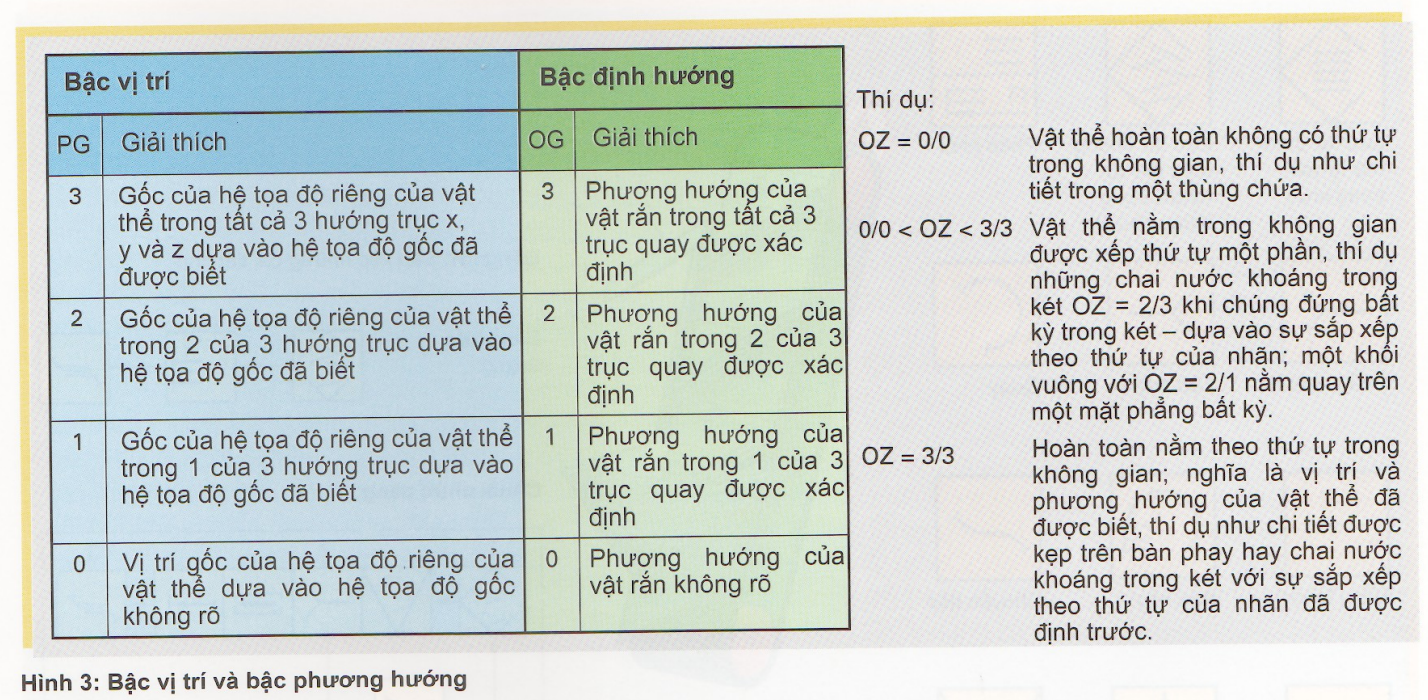 Sự khác biệt giữa xử lý thao tác và vận chuyển/lưu trữ ở chỗ là xử lý thao tác di chuyển vật thể có dạng* hình học xác định được và như thế phương hướng của vật thể đóng một vai trò quan trọng. Trong khi vận chuyển/lưu trữ cũng có thể di chuyển cả vật thể có dạng hình học không xác định được (thí dụ chất lỏng hay chất khí) mà bậc phương hướng của nó chỉ có vai trò thứ yếu. Sau đây là việc tiếp tục phân chia nhỏ khái niệm xử lý thao tác.
Sự khác biệt giữa xử lý thao tác và vận chuyển/lưu trữ ở chỗ là xử lý thao tác di chuyển vật thể có dạng* hình học xác định được và như thế phương hướng của vật thể đóng một vai trò quan trọng. Trong khi vận chuyển/lưu trữ cũng có thể di chuyển cả vật thể có dạng hình học không xác định được (thí dụ chất lỏng hay chất khí) mà bậc phương hướng của nó chỉ có vai trò thứ yếu. Sau đây là việc tiếp tục phân chia nhỏ khái niệm xử lý thao tác.
Theo quy định VDI 2860, việc xử lý thao tác được chia thành năm phần chức năng nhỏ, chức năng nhỏ này lại được chia thành những chức năng cơ bản (Bảng 1). Những chức năng được hợp thành dựa trên những chức năng cơ bản để mô tả dễ dàng hơn những quá trình xử lý thao tác.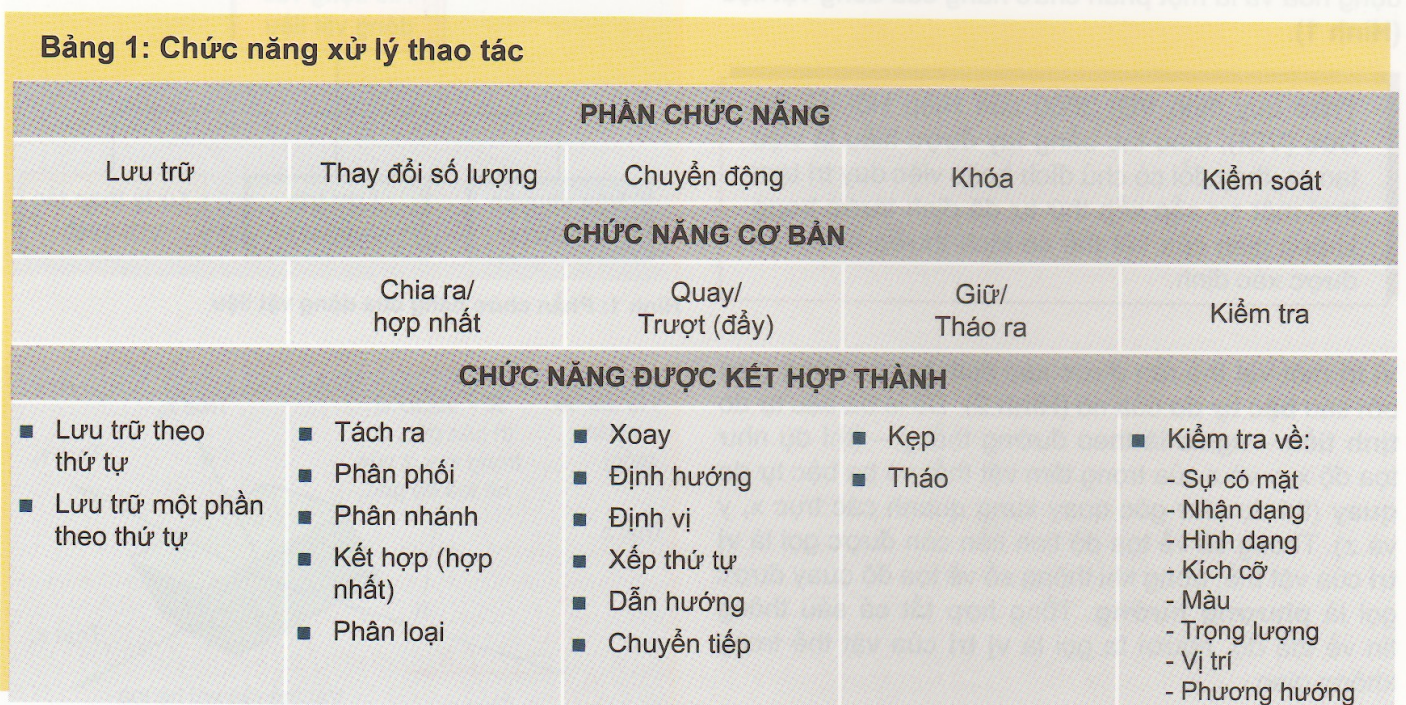 về nguyên tắc, tất cả những nhiệm vụ xử lý thao tác đều có thể mô tả với những chức năng cơ bản này. Để trình bày một cách đơn giản hơn, một cách diễn tả các chức năng này qua biểu tượng đã được phát triển và
về nguyên tắc, tất cả những nhiệm vụ xử lý thao tác đều có thể mô tả với những chức năng cơ bản này. Để trình bày một cách đơn giản hơn, một cách diễn tả các chức năng này qua biểu tượng đã được phát triển và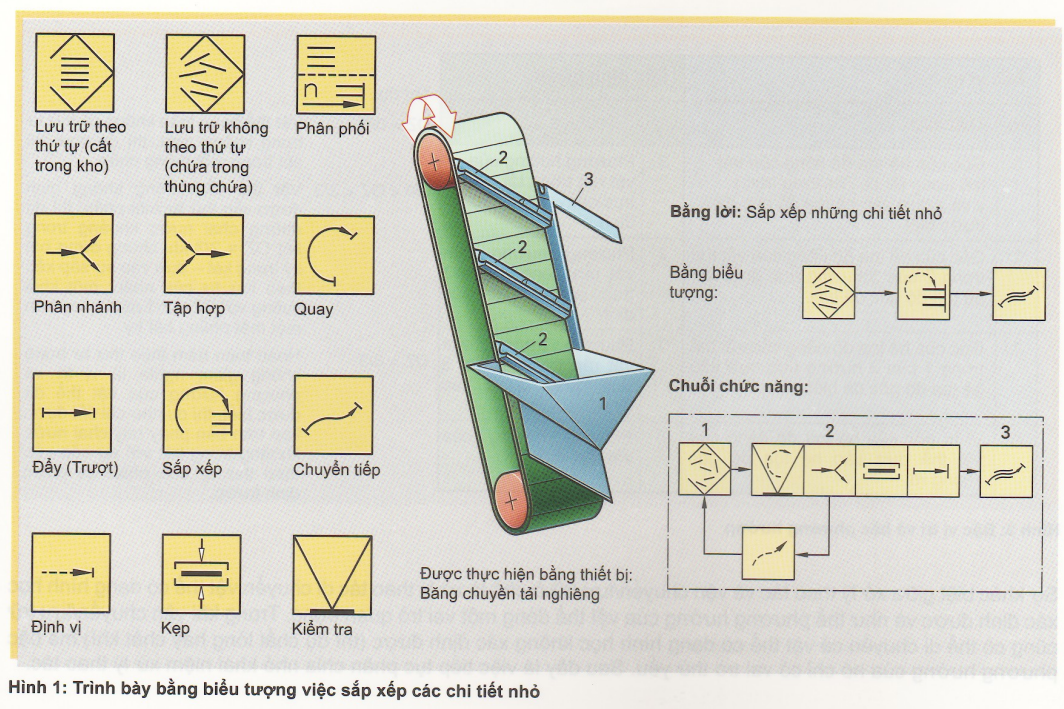 đưa vào quy định VDI 2860. Như thế người ta có thể thiết kế một sơ đồ chức năng để mô tả các quá trình xử lý thao tác mà không lệ thuộc vào bất kỳ nhà sản xuất nào (Hình 1). Sơ đồ chức năng này có thể sử dụng để làm cơ sở thảo luận cho việc tối ưu hóa quá trình gia công.
đưa vào quy định VDI 2860. Như thế người ta có thể thiết kế một sơ đồ chức năng để mô tả các quá trình xử lý thao tác mà không lệ thuộc vào bất kỳ nhà sản xuất nào (Hình 1). Sơ đồ chức năng này có thể sử dụng để làm cơ sở thảo luận cho việc tối ưu hóa quá trình gia công.
9.1 Thiết bị xử lý thao tác
Thiết bị xử lý thao tác là những trang thiết bị kỹ thuật để thực hiện nhiệm vụ xử lý thao tác. Thông thường việc phân bố chức năng một cách rõ ràng cho thiết bị xử lý thao tác là điều không thể thực hiện được (so sánh Bảng 1, trang 264) vì các thiết bị này có thể hoàn thành không phải chỉ một mà nhiều chức năng con. Robot công nghiệp là một thí dụ cho thấy một mặt nó có thể xử lý thao tác với chi tiết (chức năng con là di chuyển và thay đổi số lượng), mặt khác có thể giữ chi tiết bên máy để đánh bóng chi tiết (chức năng con là giữ). Thường thì người ta ấn định một chức năng chính cho thiết bị xử lý thao tác và có thể xếp nó sơ bộ theo Bảng 1 dựa vào việc chia nhỏ công đoạn xử lý thao tác (so sánh Bảng 1, trang 264).
Trang thiết bị xử lý thao tác do đó không nhất thiết chỉ là “sản phẩm công nghệ cao” mà tất nhiên cũng có thể là loại gá lắp đơn giản và thông thường. Chúng không bắt buộc phải có riêng hệ điều khiển bằng điện tử mà cũng có thể được điều khiển bởi những phương pháp đơn giản bằng cơ khí (thí dụ như công tắc giới hạn, điều khiển bằng cam).
Trang thiết bị xử lý thao tác cho chuyển động được chia theo VDI 2861 thành các nhóm khác nhau như sau: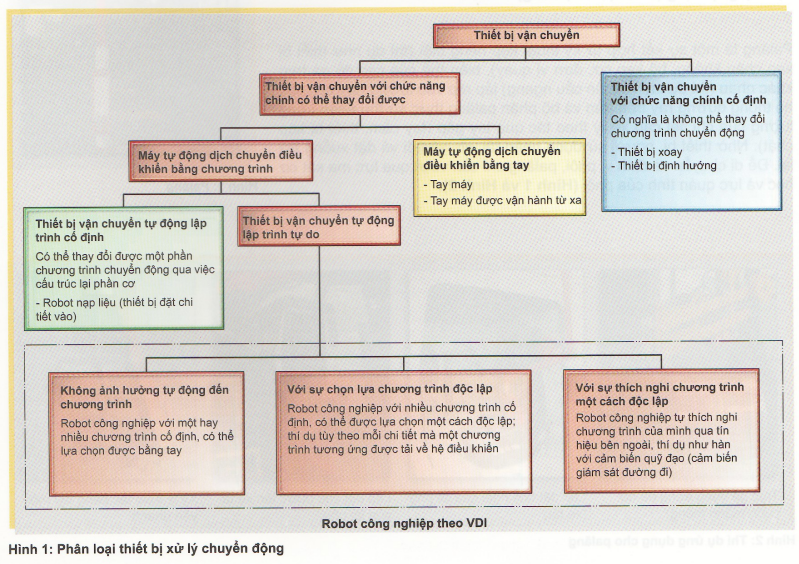
Thiết bị vận chuyển với chức năng chính cố định nói chung chỉ thỏa mãn một phần chức năng xử lý thao tác. Thường thì những thiết bị này là loại đặc biệt được sử dụng trong lĩnh vực sản xuất hàng loạt.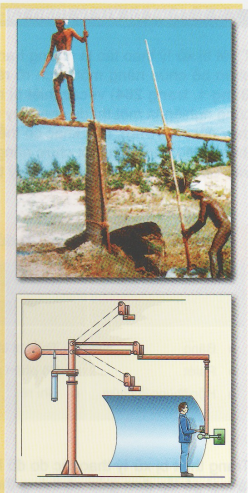
Thiết bị vận chuyển với chức năng chính thay đổi được có khả năng thực hiện nhiều chức năng con của xử lý thao tác. Nhóm này được phân loại tiếp thành thiết bị xử lý chuyển động điều khiển bằng tay (thủ công) và điều khiển bằng chương trình.
Trong thiết bị vận chuyển bằng tay (thí dụ tay máy, cần cẩu, tời) người sử dụng tạo ra chuyển động trực tiếp, có nghĩa là không có bộ phận điện tử lưu trữ và kiểm tra trình tự chuyển động.
ở thiết bị vận chuyển điều khiển bằng chương trình, chuyển động được tạo ra qua một chương trình, được lưu trữ hoặc bằng cơ (thí dụ như đĩa cam hay đĩa đường cong) hoặc bằng điện tử (EPROM, EEPROM). Thiết bị xử lý chuyển động điều khiển bằng chương trình được phân loại tiếp dựa vào cách thay đổi chương trình. Một trong những thiết bị xử lý chuyển động quan trọng nhất là robot công nghiệp.
9.1.1 Palăng (Cần cẩu, tời)
Để có thể nâng tải trọng và tránh hiện tượng mỏi ngay cả khi nâng tải nhẹ, càng ngày càng nhiều nơi làm việc được trang bị với các phương tiện trợ giúp nâng (thiết bị hỗ trợ nâng).
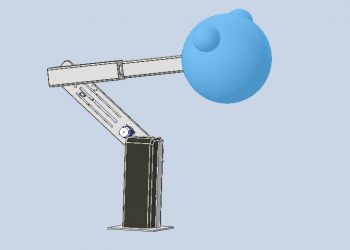
Palăng là một sự kết hợp từ kỹ thuật kẹp riêng biệt (thí dụ như thiết bị kẹp chân không, bộ kẹp cơ, đơn vị quay), biến thể của các đồ gá treo khác nhau (thí dụ tay với cần cẩu ngang) lắp ráp vào tường hay vào cột, hệ thống đường ray trên trần và bộ phận palăng thực sự thu nhận trọng lượng của chi tiết cần xử lý thao tác qua tay gắp (tay cầm, thiết bị kẹp chặt). Nhờ thiết bị, người sử dụng nhận tải, chuyển đi và đặt xuống trở lại. Để di chuyển và định vị phôi, palăng chỉ cần vượt qua lực ma sát cơ học và lực quán tính của phôi (Hình 1 và Hình 2).
9.1.2 Tay máy (thao tác bằng tay) (Hình 1)
Đây là những thiết bị xử lý thao tác mà trình tự chuyển động được điều khiển thủ công (nghĩa là điều khiển bằng tay qua một người vận hành). Vì thế mà thiết bị không thể lập trình được. Phần lớn chúng được ứng dụng vào việc xử lý thao tác cho những chi tiết không dễ điều khiển (nặng và/ hoặc nóng), thí dụ như trong khuôn rèn (dập nóng).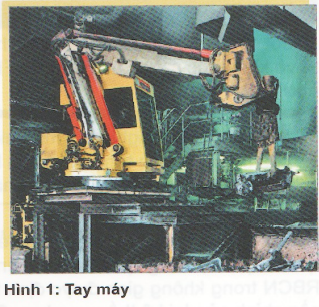 9.1.3 Thiết bị được vận hành từ xa (Hình 2)
9.1.3 Thiết bị được vận hành từ xa (Hình 2)
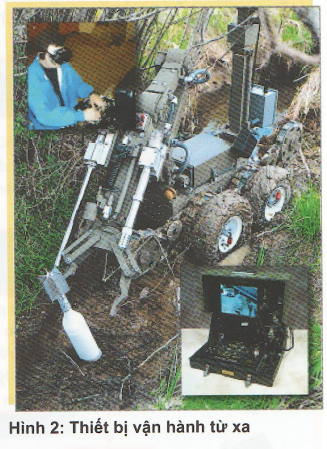
Thuật ngữ này được hiểu là tay máy được điều khiển từ xa. Phần lớn chúng được sử dụng khi việc tiếp xúc với vật thể cần xử lý rơi vào những trường hợp sau:
■ Nguy hiểm đến tính mạng, thí dụ kỹ thuật hạt nhân, tháo ngòi nổ của bom đạn
■ Không thể hoặc chỉ thực hiện được với nhiều công sức về mặt kỹ thuật, thí dụ ở biển sâu, hệ kênh cấp thoát nước.
Phần lớn người sử dụng giao tiếp với hệ thống máy quay phim (video) để có thể nhận được hình ảnh gần thực tế nhất về môi trường xung quanh. Nói chung, ngay cả máy xử lý thao tác này cũng không thể lập trình được.
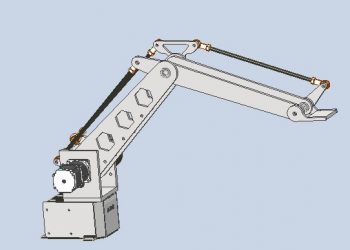
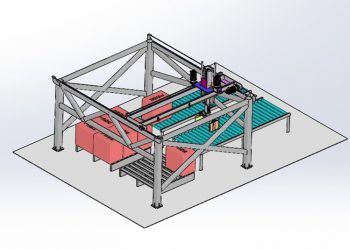
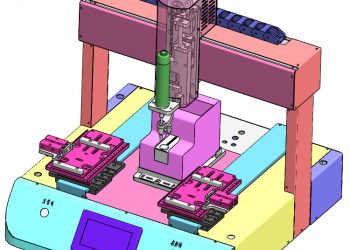
9.1.4 Hệ thống có cấu trúc mođun (Hình 3)
Những thiết bị xử lý thạo tác này có thể lắp ráp theo mođun từ hệ dẫn động quay hoặc tịnh tiến và các hệ thống kẹp khác nhau tùy yêu câu. việc điều khiển được thực hiện một cách đơn giản hoặc qua công tắc giơi hạn hay điều khiển điện tử, cho phép lập trình được những đoạn đường dịch chuyển. Thêm vào đó, cần thiết phải có những hệ đo hành trình cho từng cụm dẫn động riêng lẻ sao cho qua đây những hệ thông CNC được hình thành.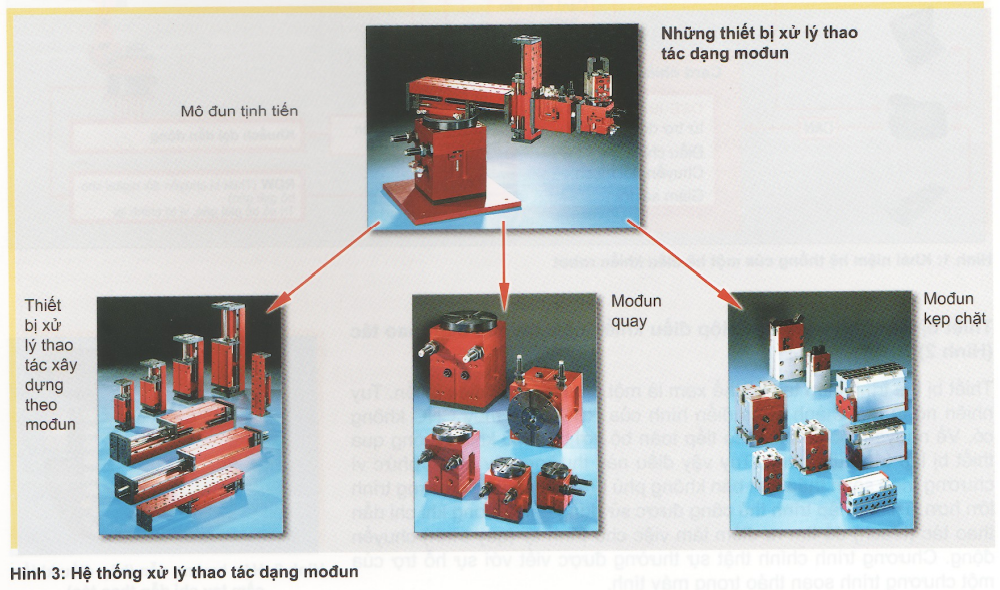 7.9.1.5 Robot công nghiệp
7.9.1.5 Robot công nghiệp
Robot công nghiệp (RBCN) là loại thiết bị xử lý thao tác đa năng nhất nhưng cũng đắt tiền nhất. Liên đoàn quốc tê vê khoa học người máy/robot (IFR = International Federation of Robotics) định nghĩa một robot công nghiệp như sau:
Một robot công nghiệp là một thiết bị xử lý thao tác đa năng với ít nhất ba trục mà mô hình chuyển động củạ nó có thể lập trình tự do mà không cần phương tiện hỗ trợ cơ học. RBCN có thể được lắp đặt cơ cấu chấp hành cuối, thí dụ như tay nắm hay dụng cụ.
RBCN có một hệ điều khiển CNC để lập kế hoạch cho quỹ đạo và có thể khai thác thông tin từ môi trường xung quanh qua sự trợ giúp của cảm biến và sử dụng thông tin này để xử lý chương trình cua nó. Chuyển động của RBCN trong không gian được định trước bởi một chương trình và có thể thay đổi tương đối nhanh mà không cần chỉnh sửa lại hệ thống cơ học. Qua độ linh hoạt rất cao của nó, RBCN thực ra đã được định trước để nhận nhiệm vụ trong lĩnh vực sản xuất linh hoạt vì dòng sản phẩm của xưởng máy càng ngày càng phát triển hơn đông thời cỡ lô (số lượng hàng sản xuất trong một đợt) ngày càng trở nên nhỏ đi. Những thành phần quan trọng nhât để cấu thành RBCN được thể hiện trong Hình 1: Thiết bị lập trình cầm tay / Hộp điều khiển cầm tay chỉ dẫn thao tác (Hình 2)
Thiết bị lập trình cầm tay / Hộp điều khiển cầm tay chỉ dẫn thao tác (Hình 2)
Thiết bị lập trình cầm tay có thể xem là một phần của hệ điều khiển. Tuy nhiên nó là một thành phần điển hình của RBCN mà máy CNC không có. về nguyên tăc có thể giao tiếp toàn bộ với hệ điều khiển thông qua thiết bị lập trình thủ công. Tuy vậy điều này thường gây phiền phức vì chương trình soạn thảo văn bản không phù hợp cho những chương trình lớn hơn. Thiết bị lập trình thủ công được sử dụng chính trong khi chỉ dẫn thao tác (teach) để tìm ra điểm làm việc cho trình tự (quy trình) chuyển động. Chương trình chính thật sự thường được viết với sự hỗ trợ của một chương trình soạn thảo trong máy tính.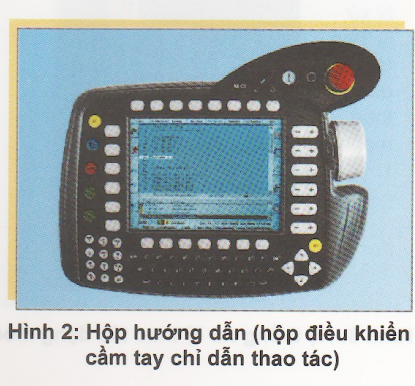 Điều khiển và phần mềm
Điều khiển và phần mềm
Việc điều khiển robot có thể so sánh với điều khiển CNC của máy gia công (phay, tiện, vv). Có thể nói là hệ điều khiển đóng vai trò trái tim hay bộ óc của toàn bộ robot.
Nhiệm vụ chính của hệ điều khiển robot – còn gọi là RC (Robot Control) là:
■ Điều chỉnh trục (tốc độ và vị trí)
■ Nội suy quỹ đạo (thí dụ như đường thẳng hay vòng tròn)
■ Chuyển đổi tọa độ (thí dụ tính tọa độ không gian ra tọa độ khớp nối)
■ Giao tiếp với giao diện (thí dụ cổng vào và cổng ra; hệ thống bus trường)
■ Giao tiếp với máy tính cá nhân bên ngoài
■ Giao tiếp với hộp điều khiển thao tác bằng tay
■ Quản lý chương trình (thí dụ lưu trữ và soạn thảo)
Chính việc chuyển đổi tọa độ và phép nội suy quỹ đạo là những quá trình rất tốn thời gian sử dụng máy tính và còn phải thực hiện càng nhanh càng tốt để các trị số định mức có thể được chuyển tiếp đến thiết bị điêu chỉnh rồi so sánh với trị số thực tế. Như thế hình thành một chuyển động chính xác theo quỹ đạo và không bị rung.
Do vô số công việc dồn đến, nhiều nhà sản xuất robot chuyển sang việc gắn nhiều bộ xử lý chạy song song cho hệ điều khiển (Hình 1).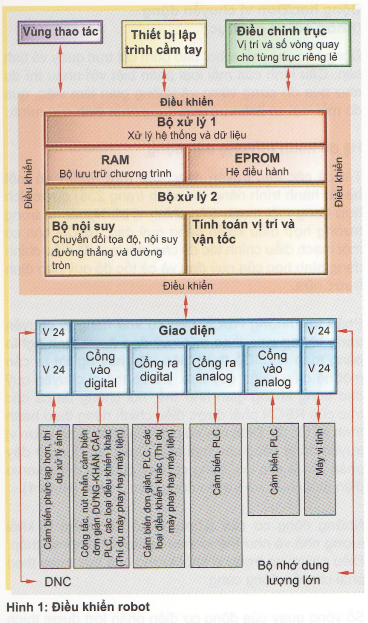
Cơ cấu thực hiện cuối cùng (Cơ cấu chấp hành cuối) (Hình 2)
Với chi tiết phụ này nhiệm vụ thực sự của xử lý thao tác được thực hiện. Người ta phân biệt cơ cấu thực hiện cuối cùng thành những nhóm chính là nhóm tay kẹp (tay gắp) và nhóm dụng cụ.
Có loại tay gắp đơn giản (với hai trạng thái mở và đóng) cho đến hệ thống gắp phức tạp được điều khiển bởi cảm biến để thực hiện gia công với nhiều ứng dụng phong phú. Dụng cụ được đưa vào sử dụng thí dụ như kềm hàn hay hệ thống đo. Những hệ thống máy quay phim digital với chương trình xử lý ảnh (được gọi là những hệ thống thị giác) để nhận dạng vị trí và đối tượng cũng như đo đạc vật thể (đối tượng) cũng thường xuyên được RBCN thực hiện. Nhờ thê mà cơ cấu thực hiện cuối cùng có thể gắp và chuyển tiếp những chi tiết nằm một cách ngẫu nhiên trên một băng chuyền di chuyển.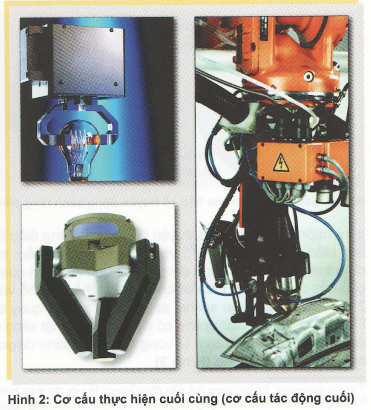
Độ linh hoạt thường được nâng cao qua những hệ thống thay đổi dụng cụ. Đó là những đồ gá để thay thế tự động các cơ cấu thực hiện cuối cùng.
Động học/Đơn vị chuyển động
(Khớp nối và cốt trục)
Động học cho mỗi robot bao gồm cốt trục quay và tịnh tiến. Cấu hình của mỗi loại phân biệt với nhau thí dụ như qua độ cứng vững và không gian làm việc, qua đó mỗi loại có lĩnh vực ứng dụng nhất định của mình.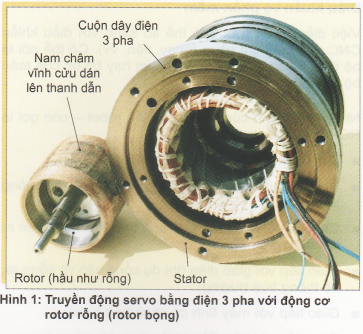
Hệ đo hành trình/Hệ dẫn động
Tất cả các trục truyền động của một RBCN có một hệ đo hành trình riêng (so sánh trang 238) được tích hợp trong một mạch điều chỉnh vị trí. Ngoài ra, trong trường hợp điều khiển bằng quỹ đạo, RBCN còn có một mạch điều chỉnh tốc độ cho mỗi trục để điều chỉnh dạng hình học của quỹ đạo và cả tốc độ quỹ đạo định trước nữa.
Phần lớn những RBCN đều có khả năng di chuyển trọng không gian theo một quỹ đạo được định nghĩa bằng toán học. Đẻ thực hiện việc này người ta cần một hệ điều khiển quỹ đạo. Để có thể di chuyển quỹ đạo trong không gian như thế, nói chung tất cả các trục của RBCN phải được điều chỉnh riêng theo hành trình và tốc độ. Điều này có nghĩa là phải có sẵn đơn vị truỵền động riêng cho mỗi trục. Được sử dụng ở đây phân lớn là các loại động cơ điện (truyền động servo điện một chiều và truyền động điện 3 pha) (Hình 1).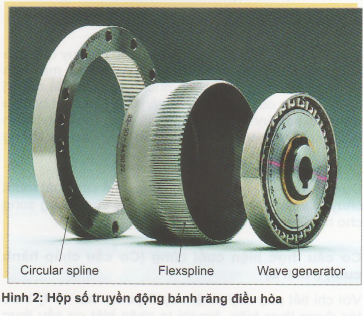
Những động cơ này (Hình 1) có đặc điểm là khối lượng nhỏ và như thế momen quán tính khối sẽ thấp. Điều này quan trọng vì khối lượng của trục quay theo phải chuyển động cùng.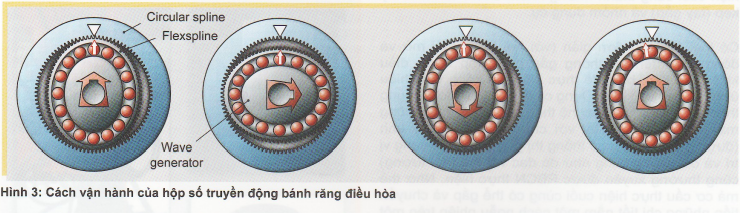
Số vòng quay của động cơ điện phần lớn được thích nghi với một bộ dẫn động (hộp số truyền động) bánh răng điều hòa (Hình 2). Bộ dẫn động sóng (Wave generạtor-1) trong hộp số truyền động bánh răng điều hòa được xem là phần được truyền động qua vòng bi sẽ làm biến dạng Flexspline2), vòng thép hình trụ mềm này ở trong tình trạng tác dụng với Circular spline3) qua răng trong cố định ở vùng đối diện có bán kính lớn của trục bầu dục. Với việc quay của bộ dẫn động sóng, trục bầu dục có bán kính lớn dời chỗ và như thế dời chỗ vùng răng ăn khớp vào nhau. Vì vòng Plexspline có It hơn 2 răng so với Circular spline, sau một nửa vòng quay của bộ dẫn động sóng, một chuyển động tương đối giữa Flexspline và Circular spline có độ lớn bằng một răng được thực hiện và sau cả vòng quay 2 vòng sẽ chuyển động tương đối là 2 răng, ở vòng Circular spline được giữ cố định, Flexspline là phần tử bị dẫn động sẽ quay ngược lại bộ dẫn động (Hình 3).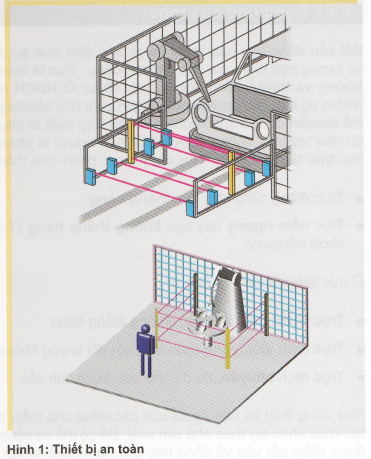
Nhờ vào việc không có độ rơ trong cắt răng, hộp số truyền động bánh răng điều hòa có được độ chính xác định vị nhỏ hơn một phút góc và độ chính xác lặp lại vài giây góc. Chỉ với ba bộ phận, người ta có thể đạt đến độ giảm tỷ số truyền (giảm tốc) xuống còn 50:1 đến 320:1 với hiệu suất đến 85%. Vì việc truyền lực được thực hiện qua một phạm vi tác động lớn giữa các răng (vùng răng ăn khớp vào nhau lớn), hộp số truyền động bánh răng điều hòa có thể truyền momen quay đỉnh cao nhất. Hộp số này chứng tỏ có được độ bền xoắn cao qua toàn bộ vùng momen quay. Nó không tự hậm lại được nhờ ma sát và được sử dụng cả trong chế độ vận hành giảm tốc cũng như tăng tốc.
Thiết bị ngoại vi
Hầu như không có ứng dụng robot nào mà không có cảm biến, có nghĩa là không có thông tin từ môi trường ứng dụng. Cảm biến ngoài, kết nối với hệ điều khiển qua giao diện, cung cấp các thông số có ảnh hưởng vào chương trình đến hệ điều khiển (thí dụ chi tiết có hay không, chỉnh sửa vị trì qua cảm biến trong mài, cảm biến điều khiển hàn).
Ngoài ra, những cảm biến đặt ngoài cung cấp thông tin về an toàn cho người, máy móc và sản phẩm vì RBCN là những máy tự động cho việc xử lý chuyển động với nhiều trục có thế lập trình tự do. Khả năng* di chuyên tự do trong không gian của RBCN co thể dẫn đến tai nạn đặc trưng của robot trong phạm vi nguy hiểm (đương bao của không gian di chuyển của robot) qua những chuyển động đầy năng lượng như vận tốc dịch chuyển nhanh và/hoặc chuyển động của khối lượng lớn. Do đó diễn biến của chuyển động và sự khởi động di chuyển của robot rất khó để tiên đóan trước vì khả năng lập trình tự do của nó, nhất là khi những biến số của chương trình robot có thể thay đổi vì các điều kiện sản xuất và môi trường xung quanh. Người ta phải lắp đặt những thiết bị an toàn đề dừng máy ngay khi có người vào trong khu vực nguy hiểm (Hình 1). Thông thường đó là những biện pháp sau:
■ Hàng rào ánh sáng (rào chắn quang)
■ Đệm nhấn (tấm công tắc)
■ Kiểm soát nhận dạng
Công nhân làm việc ở gần khu vực robot hoạt động phải được bảo vệ trước nguy hiềm gây ra bởi thiết bị này.
Bên cạnh những tiêu chí quan trọng như loại điều khiển, số lượng và loại giao diện (bus, analog/digital), có những đại lượng đặc trưng cơ học theo quy định của VDI (Hội kỹ sư Đức) cho việc đánh giá thông nhất những hệ robot khác nhau (Bảng 1).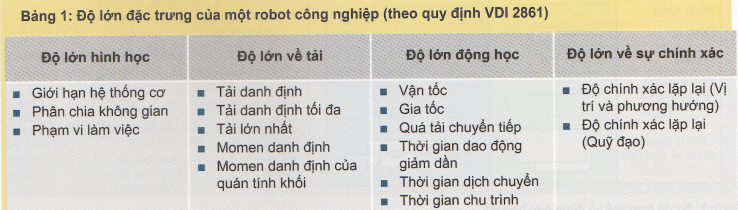
















{kind=link}