
Người ta phân biệt giữa tay máy (thiết bị thao tác, thiết bị giả động tác tay người), thiết bị đặt vào (điển vào) và robot công nghiệp (RBCN). Các loại đó có những hệ điều khiển và những khả năng lập trình khác biệt cho quy trình chuyển động.
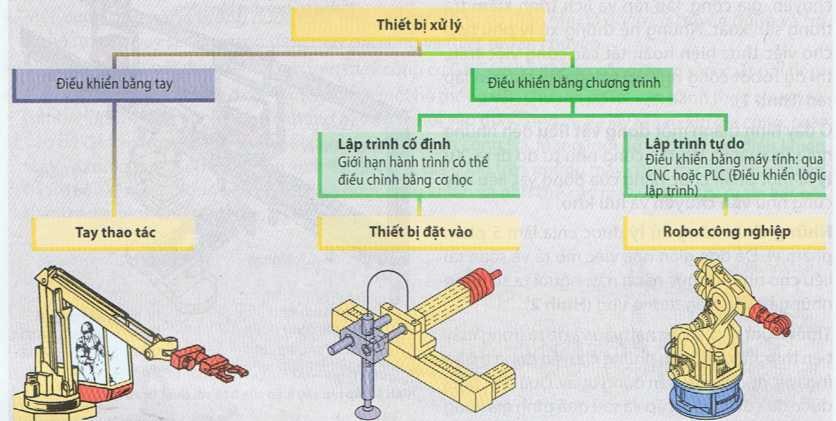
Hình 1: Phân chia hệ thống xử lý theo loại điếu khiển
Tay máy có thể di chuyển những cấu kiện nặng của máy và những tải nặng nguy hiểm thông qua điều khiển bằng tay. Qua việc điều khiển từ xa, thiết bị thao tác có thể sử dụng trong những nơi mà con người không được phép bước vào vì nhiệt độ nóng, lạnh, có áp suất hay chịu tia phóng xạ.
Thiết bị đặt vào (điển vào, nạp liệu) là những thiết bị được trang bị cho chuyển động tay kẹp tự động. Nó được đưa vào sử dụng trong sản xuất với số lượng lớn, khi thực hiện di chuyển từ điểm-tới-điểm, thí dụ như đưa chi tiết hoặc dụng cụ từ máng trữ đến máy. Những chuyển động đơn giản, như chuyển động nâng và chuyển động xoay, được điểu chỉnh qua cữ chặn hoặc công tắc giới hạn.
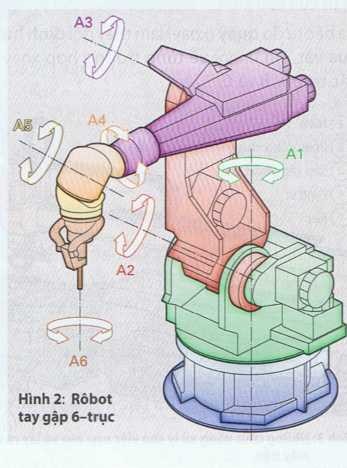
Robot công nghiệp có thể chuyển động hầu như không giới hạn trong không gian hoạt động. Chuyển động có thể được lập trình tự do hoặc điểu khiển qua cảm biến.



















{kind=link}