
Chuyển động theo đường: Bài 8
- Trong nhiều hoạt động, ví dụ hàn hồ quang, sơn, xếp dỡ vật liệu trong không gian có nhiều chướng ngại vật, robot cần được điều khiển theo đường. Khi đó số lượng điểm của mỗi đường lớn hơn hai. Đó có thể không chỉ là điểm phải đi qua đơn thuần mà tại đó có thể phải khống chế cả vận tốc và gia tốc để đáp ứng yêu cầu công nghệ. Các điểm như vậy gọi là các điểm chốt, số lượng điểm này nhiều hay ít tùy thuộc yêu cầu độ chính xác của quỹ đạo.
- Bài toán đặt ra là xác định quỹ đạo qua N điểm chốt. Như vậy mỗi biến khớp phải thỏa mãn N điều kiện ràng buộc. Để thực hiện điều đó, có thể nghĩ đến quỹ đạo dạng đa thức bậc (N–1). Tuy nhiên giải pháp này có các nhược điểm:
–Không thể khống chế được vận tốc tại điểm đầu và điểm cuối.
–Bậc đa thức càng cao thì khả năng dao động càng lớn, ảnh hưởng xấu đến trạng thái làm việc của robot.
–Độ chính xác tính toán các hệ số của đa thức giảm khi bậc của đa thức tăng.
–Hệ phương trình ràng buộc phức tạp và khó giải.
–Các hệ số của đa thức phụ thuộc tất cả các điểm, vì vậy khi cần sắp xếp lại một điểm thì cũng phải tính toán lại toàn bộ.
Có thể khắc phục các nhược điểm trên bằng cách sử dụng một quỹ đạo lai, trong đó một số đoạn đa thức bậc cao được thay thế bằng các đoạn đa thức có bậc thấp hơn. Các đa thức thay thế gọi là đa thức nội suy.
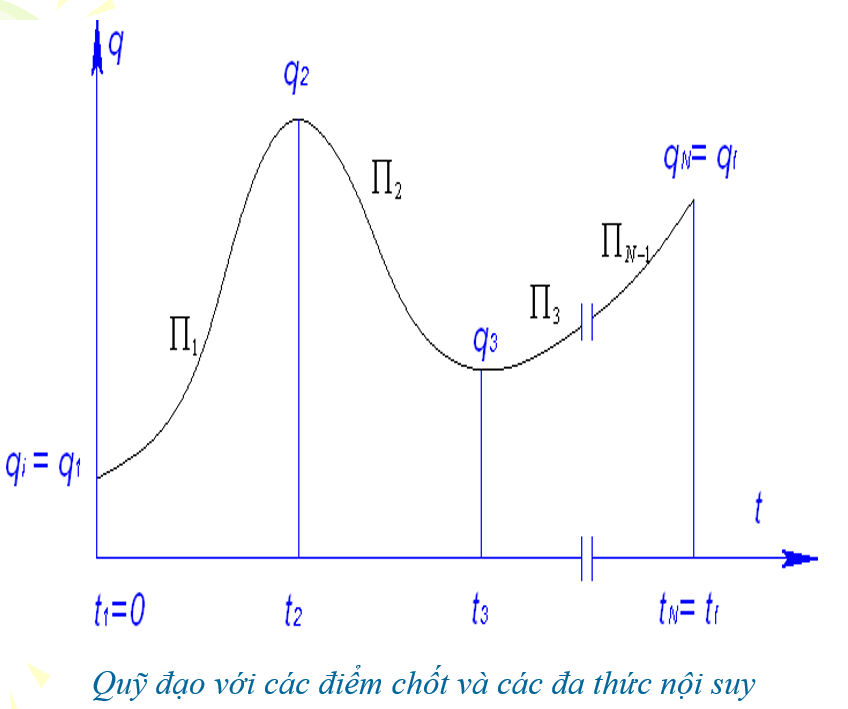
- Để đảm bảo tính liên tục của vận tốc tại các điểm chốt, bậc của đa thức nội suy không thể nhỏ hơn bậc ba, xét quy luật biến thiên theo thời gian của một biến khớp q(t). Đường cong biến thiên của nó gồm N – 1 đoạn đa thức nội suy bậc ba với k = 1..(N-1). Hàm q(t) nhận giá trị qk tại điểm tk (k = 1..N). Tại điểm đầu t1 = 0, giá trị q1 = qi (i : initial), tại điểm cuối tN = tf (f: finish) có qN = qf. Các giá trị qk chính là đại diện cho các điểm chốt của quỹ đạo
- Quỹ đạo được thiết kế cần phải thỏa mãn những điều kiện ràng buộc, nhất định có thể xem xét các trường hợp sau:
–Giá trị vận tốc tại các điểm q’(t) tại các điểm chốt là xác định,
–Giá trị q’(t) tại các điểm chốt được tính theo các chỉ tiêu xác định,
–Đảm bảo tính liên tục của gia tốc q”(t) tại các điểm chốt.



















{kind=link}