
- Với phương pháp Lagrange, mô hình động lực học của tay máy xuất phát từ tổng năng lượng của hệ thống. Phương pháp Newton – Euler xây dựng mô hình dựa trên sự cân bằng của hệ lực tác dụng lên hệ thống. (Nguyên lí đalămbe cho hệ lực cân bằng)
- Sơ đồ động học dẫn đến công thức Newton – Euler như sau:
fi – fi+l + migo = mip
Chuyển động tịnh tiến của trọng tâm được mô tả bằng công thức Newton:
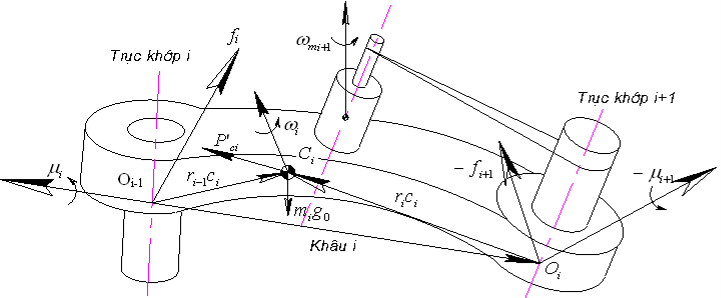
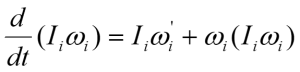
- Công thức Euler được dùng cho chuyển động quay của khâu, trong đó các momen được tính đối với tọa độ tâm và trọng lực migo không gây nên momen, vì nó được đặt ngay tại trọng tâm:

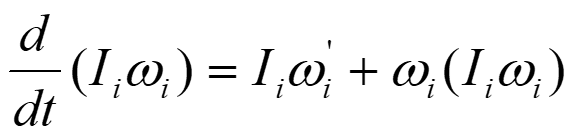
- Đạo hàm thành phần thứ nhất của vế phải:
- Đạo hàm thành phần thứ hai:

-
- Thay vào công thức Euler

-
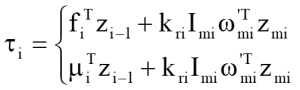
- Lực tổng quát có thể tìm được bằng cách chiếu lực fi ( đối với khớp trượt ) hoặc momen ( đối với khớp quay ) lên trục khớp, cộng thêm momen quán tính của rotor:
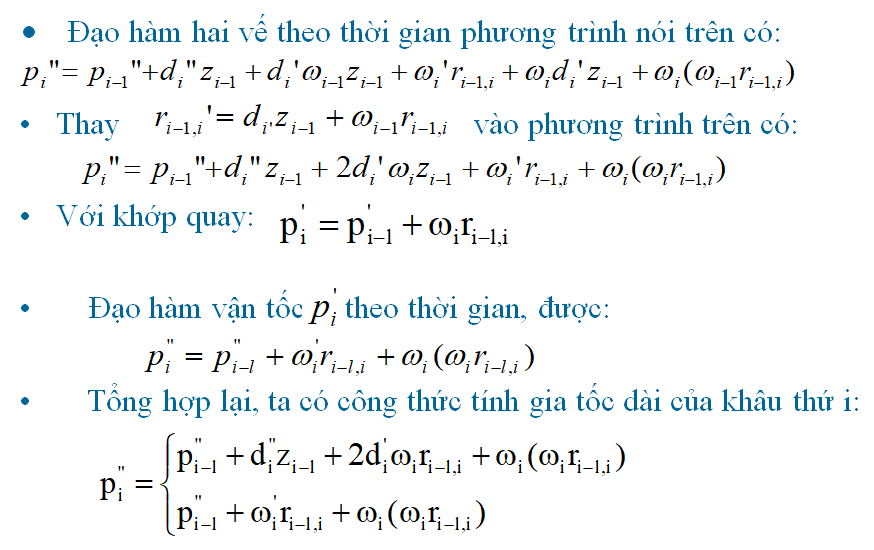
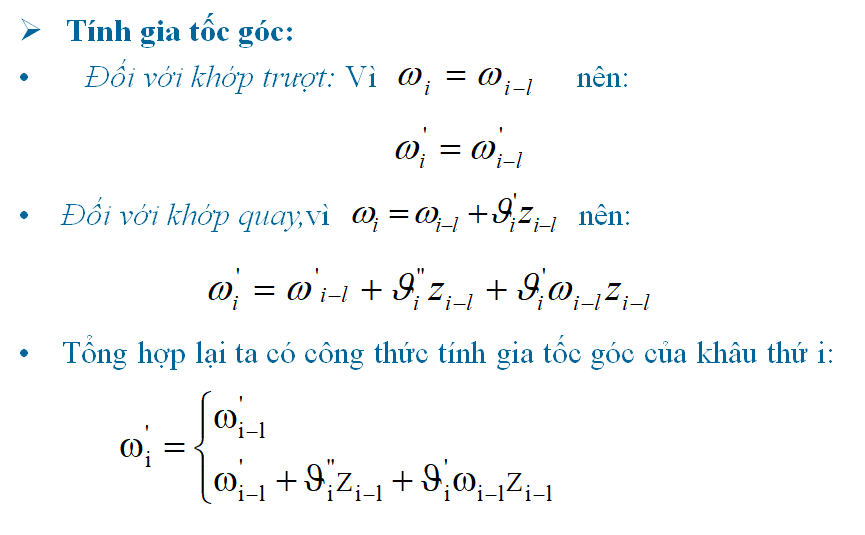
- 3.2.2. Tính gia tốc của khâu:
- Tính gia tốc dài:
- Đối với khâu (i), để tính được gia tốc cần biết vận tốc và gốc của vấn đề là cần biết véc tơ xác định vị trí của trọng tâm khâu (i).
- Với khớp trượt, kí hiệu pi-1; pi lần lượt là véc tơ vị trí của khớp (i – 1) và khớp (i), ri-1,i là khoảng cách giữa hai trục của chúng, di là khoảng dịch chuyển theo khớp (i) ta có:





















{kind=link}