

Không có gì khác nhau, bạn có thể sử dụng một số thứ khác nhau. Nam tính của họ không có gì khác nhau
Robot trong phần mềm có thể có 4
– Hệ thống phát động and take hành
– system cảm biến (cảm biến)
– Bộ controls (Controller), including the hardware and software the system
– This program controls.
Nó kết hợp với người máy, người máy của họ
2.1. Robot như phần cứng của robot
Phần cứng và phần cứng, phần cứng, phần cứng và phần cứng. Thiết bị robot Thiết kế trong phần mềm và thiết kế của máy tính. Trong phần mềm của bạn, phần của bạn, phần của bạn
– Hoạt động linh hoạt
– Chắc chắn, gọn gàng về cơ khí
– Đảm bảo hài hòa hợp centered Robot with the environments
– Sự hòa hợp centered Robot with the user name
– Thiết kế may xu hướng Vendor
With requested về khối lượng nâng are như là trò chơi của chúng tôi, người bạn yêu thích
2.1.1. Robot của chúng tôi
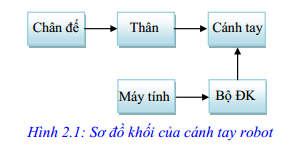
Làm thế nào để tạo ra robot tay chia làm 3 phần ((2.1):
– Phần chân đế
– Thân robot
– Phần cánh tay
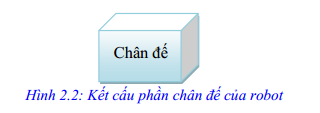
+ Phần chân đế:
Được làm bằng hộp gỗ với độ dày là 10mm, chiều cao là 100mm với kết cấu cứng cáp và chân đế này cũng là nơi ta để bộ điều khiển (Hình 2.2)
+ Phần thân robot:
Phần thân là một hình trụ tròn có đường kính 100mm, bề dày là 3mm, chiều cao 300mm (Hình 2.3)

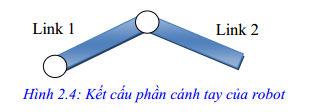
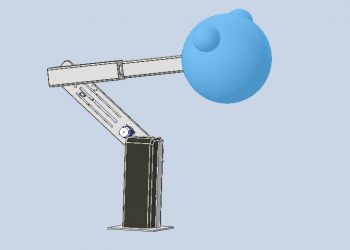
+ Phần cánh tay:
Được cấu tạo bởi những tấm mika có độ dày 10mm, chiều dài Link 1 là 10mm, chiều dài Link 2 là 95mm. Được gia công bằng tia lazer. Với kết cấu nhẹ nhàng và đẹp mắt nhưng vẫn đảm bảo được quá trình làm việc cho cánh tay robot khi robot gắp vật (Hình 2.4)
Cánh tay robot với 3 khớp chuyển động, gồm 2 khớp quay và 1 khớp tịnh tiến, trong đó 2 khớp quay được gắn 2 động cơ DC và gắn encoder, khớp tịnh tiến được điều khiển bởi hệ thống xilanh 9.
Bàn kẹp 11 được điều khiển bởi xilanh 10. Với kết cấu là khí nén nên đảm bảo khi gắp vật thì sẽ chắc chắn và độ ổn định cao.
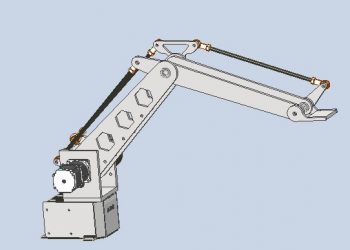
+ Tổng thể của cánh tay robot
Sau khi thiết kế riêng lẻ từng bộ phận của robot ta lắp ráp được 1 cánh tay robot hoàn thiện như sau (Hình 2.5)
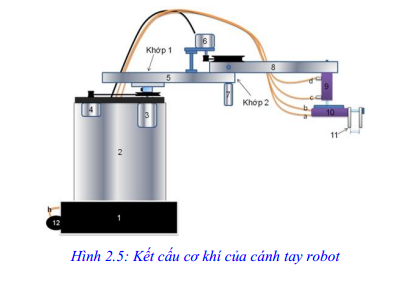
+ Chú thích:
1. Chân tay máy
2. Thân tay máy
3. Động cơ dẫn động cho khớp 1
4. Encoder phản hồi vị trí cho động cơ 3
5. Link 1
6. Encoder phản hồi vị trí cho động cơ 7
7. Động cơ dẫn động cho khớp 2
8. Link 2
9. Xilanh tịnh tiến
10. Xilanh kẹp
11. Tay kẹp
2.1.2. Cấu tạo của tay kẹp
Phần công tác của robot rất đa dạng. Trên các robot chuyên dùng thì phần công tác cũng là thiết bị chuyên dùng. Ở đề tài này thì cái với tay kẹp thì không đòi hỏi quá cao về cơ cấu chuyển động nhưng cũng cần phải hoạt động và làm việc đáng tin cậy: bắt đúng đối tượng, giữ chắc, nhưng không làm hỏng đối tượng. Ngoài ra, còn gọn nhẹ, tác động nhanh.
Với yêu cầu công nghệ như trên thì tay kẹp được chế tạo đơn giản nhằm mục đích giữ và nắm chặt đối tượng cần di chuyển (Hình 2.6).
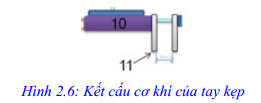
Cấu tạo của tay kẹp: Với 2 bản kẹp là bằng mika (11). Chuyển động được dẫn động bởi xilanh 10. Dẫn động bằng khí nén, nên chuyển nhanh gọn và chính xác.
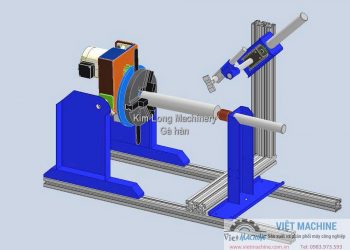
2.1.3. Truyền động khí nén
Truyền động khí nén là loại có giá thành thấp nhất, thường dùng cho các thao tác lắp đặt chi tiết trên dây truyền lắp ráp. Đặc điểm của loại này là trang bị đơn giản và dễ điều khiển. Việc thiết kế và lắp đặt loại này đơn giản nhanh gọn, chuyển động độc lập được thực hiện bởi các xilanh riêng lẻ (Hình 2.7) hay bởi các mô – đun khí nén chuyên dùng. Điểm lưu ý ở loại này là độ chính xác vị trí lặp lại thấp.
Trong hầu hết các ứng dụng cơ cấu tác động khí nén hoạt động với 2 vị trí hơn là sử dụng hồi tiếp để đạt chế độ điều khiển tỉ lệ bởi vì do tính chất của khí nén, khi điều khiển ở cuối hành trình thì độ chính xác vị trí cũng như độ lặp khá tốt nhưng khoảng giữa hành trình thì rất khó đạt được.
Đề tài ở đây dùng loại hệ thống khí nén có áp suất là 9 Mpa luôn được giữ ổn định trong quá trình làm việc của robot.

Ưu điểm:
– Giá thành không cao
– Khí thải không gây ô nhiễm môi trường
– Nguồn khí nén phổ biến trong công nghiệp
– Thích hợp cho các thiết kế dạng robot dang mô – đun
– Cơ cấu tác động có thể dừng mà không hư hỏng Nhược điểm:
– Áp suất khí nén giới hạn sự điều khiển và độ chính xác
– Khí xả gây ồn
– Khí bị rò rỉ gây trở ngại cho hệ thống
– Cần phải có bộ lọc làm khô nguồn khí nén
– Khó điều khiển tốc độ
2.1.4. Truyền động điện cơ
Với những công việc đòi hỏi chính xác, loại robot với truyền động điện tỏ ra đắc dụng nhất vì chúng cho phép bảo đảm được độ chính xác dịch chuyển cao và khả năng thực hiện những thao tác phức tạp (Hình 2.8).
Ưu điểm:
– Cơ cấu tác động nhanh và chính xác
– Có khả năng áp dụng kỹ thuật điều khiển phức tạp cho các chuyển động
– Giá thành không cao
– Thời gian triển khai hệ thống robot mới nhanh
– Nhiều động cơ có mô – men quay cao, trọng lựng giảm và thời gian đáp ứng nhanh
Nhược điểm:
– Bản chất đã là tốc độ cao
– Khe hở bộ truyền bánh răng làm giảm độ chính xác
– Gây quá nhiệt hệ thống bị dừng hoạt động khi quá tải
– Cần phải có thắng để ghim các vị trí các khớp
+ Nhóm thứ nhất:
Dùng động cơ bước (stepper motor) để thực hiện những chuyển dịch góc chính xác dưới tác dụng của các xung điện áp. Dịch chuyển góc của robot của các động cơ bước đạt được độ chính xác cao nếu mômen tải trọng không vượt quá mômen giới hạn của động cơ.
+ Nhóm thứ hai:
Phần cứng của chúng Trong toàn bộ tổng hợp của chúng tôi là một trong những mối quan hệ của bạn.



















{kind=link}